@VozdeLosMuertos Gracias
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Fuentes de la noticia (no vaya a ser que alguno crea que la escribí yo):
http://exploration.esa.int/science-e/ww ... ctid=59175 (documento original de la ESA)
http://www.esa.int/esl/ESA_in_your_coun ... hiaparelli (Noticia en Español publicada por la ESA)
http://danielmarin.naukas.com/2017/05/2 ... iaparelli/ (Blog desde donde extraje la noticia)Informe final del accidente de la sonda marciana SchiaparelliEl 19 de octubre de 2016 la sonda europea Schiaparelli se estrellaba contra la superficie de Marte dejando un bonito cráter en Meridiani Planum. Terminaba así el primer intento de la agencia espacial europea (ESA) para aterrizar suavemente en la superficie de Marte (la sonda Beagle 2 que llevaba Mars Express no fue un proyecto de la ESA). Tras una investigación preliminar en la que distintos subcontratistas se echaron la culpa unos a otros de forma un tanto bochornosa, se decidió que la causa fue un fallo en las unidad de medida inercial (IMU), de fabricación estadounidense. En concreto se dijo que la IMU (un giroscopio, hablando mal y pronto) había sufrido una saturación momentánea durante el despliegue del paracaídas, lo que provocó que el ordenador de a bordo pensase que la posición de la nave no era la prevista. Ahora, siete meses después ha aparecido el informe final de la ‘anomalía Schiaparelli’, como la denomina la ESA. ¿Y cuáles son las conclusiones?
Pues, efectivamente, al final resulta que el culpable directo del incidente escacharreli fue la IMU, aunque, como siempre ocurre en estos casos, el asunto es un poco más complicado. Veamos la secuencia de los hechos. Schiaparelli despertó de la hibernación a las 13:29:48 UTC del 19 de octubre mientras se dirigía hacía el planeta rojo tras separarse del orbitador ExoMars 2016 TGO. Los acelerómetros detectaron la entrada en la atmósfera marciana a las 14:22:22 y pocos minutos después se comprobó que la sonda estaba girando de forma inesperada.
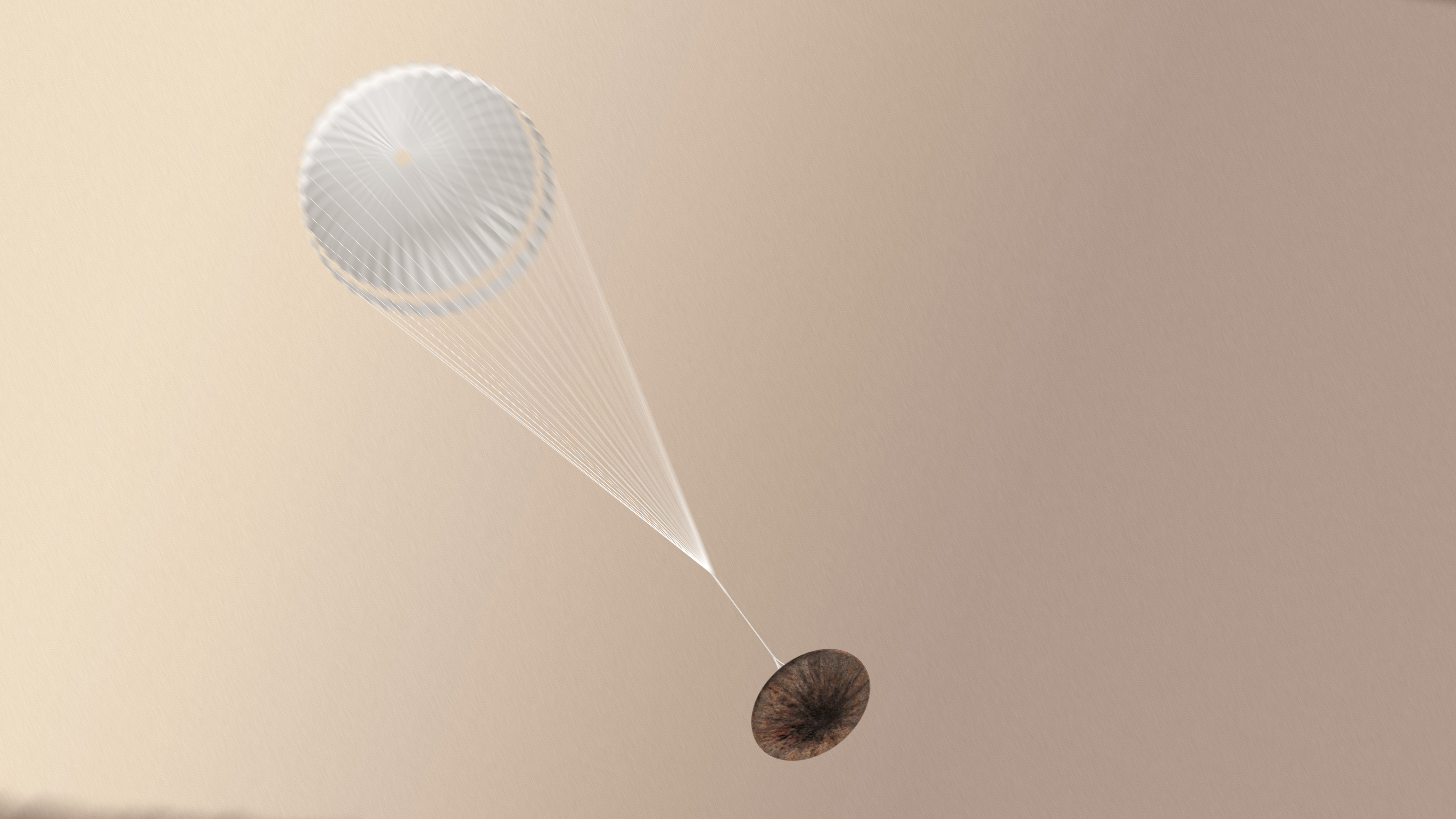
A las 14:45:23 se desplegó el paracaídas cuando la aceleración experimentada por la sonda llegó a cierto nivel preprogramado. En ese momento la cápsula estaba girando a una velocidad angular de 3 grados por segundo. El paracaídas, con un diámetro de 12 metros, se abrió a unos 11 kilómetros de altura y cuando Schiaparelli viajaba a 1700 km/h. El despliegue del paracaídas se produjo en menos de un segundo, pero generó varias oscilaciones en el vehículo con una frecuencia de 2,5 herzios. Unos 0,2 segundos después del inicio del despliegue la IMU detectó una velocidad angular de cabeceo superior a la prevista en las simulaciones. Como consecuencia la IMU se saturó y dejó de proporcionar datos útiles. El software de guiado y navegación (GNC) supuso durante este periodo de saturación que la velocidad angular de la sonda era la última detectada por la IMU, pero en realidad Schiaparelli estaba oscilando fuertemente y durante una fracción de segundo llegó a colocarse prácticamente cabeza abajo (160º). Finalmente el paracaídas se infló y terminaron las oscilaciones bruscas.
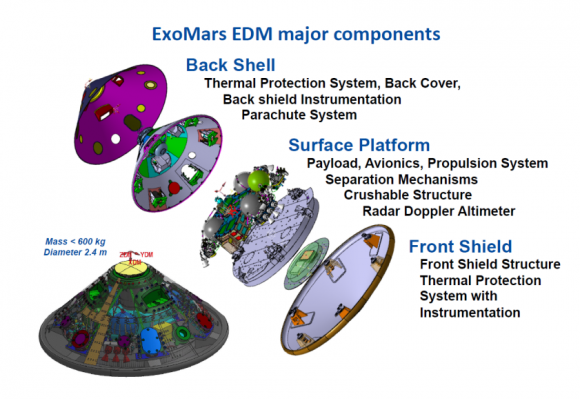
Elementos del EDM Schiaparelli (fuente: ESA).
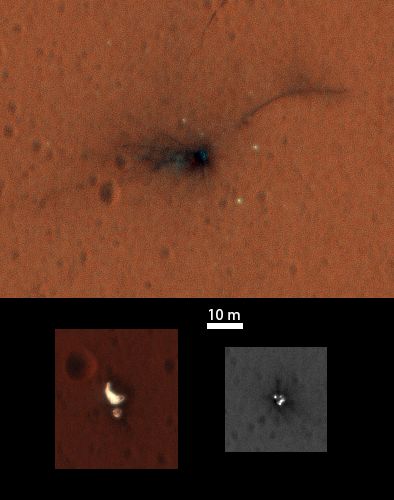
Los restos de Schiaparelli en la superficie de Marte vistos por la cámara HiRISE de la sonda MRO (fuente: ESA).
La sonda continuó su descenso y liberó el escudo térmico frontal 40 segundos después del despliegue del paracaídas. A las 14:46:19, quince segundos después de la separación del escudo térmico, se conectó el radar altímetro Doppler, elemento clave para determinar la altura y velocidad precisas de la nave. Sin embargo el sistema de navegación y guiado usó la estimación errónea de orientación de la sonda generada durante la saturación de la IMU para proyectar los datos del radar. Debido a esta discrepancia entre los datos reales del radar y la orientación —incorrecta— de la sonda calculada por el GNC el ordenador de la sonda pensó que estaba bajo la superficie (como lo oyen). Al mantenerse esta inconsistencia en los datos durante cinco segundos sin que el ordenador cuestionase en ningún momento los datos erróneos de la orientación de la sonda, el sistema GNC ordenó la separación del paracaídas y el escudo trasero a las 14:46:49. Justo dos segundos más tarde entraron en acción los nueve propulsores de hidracina que debían frenar el descenso final de la sonda hasta la superficie.
Pero, puesto que el ordenador pensaba que la sonda estaba bajo la superficie, los propulsores se apagaron solamente tres segundos después de encenderse, cuando Schiaparelli todavía estaba a 3,7 kilómetros de altura. En la débil gravedad marciana la sonda tardó 34 segundos en caer a plomo hasta la superficie y resultó destruida a las 14:47:28 UTC cuando impactó contra el suelo a 540 km/h. Fin de la historia.
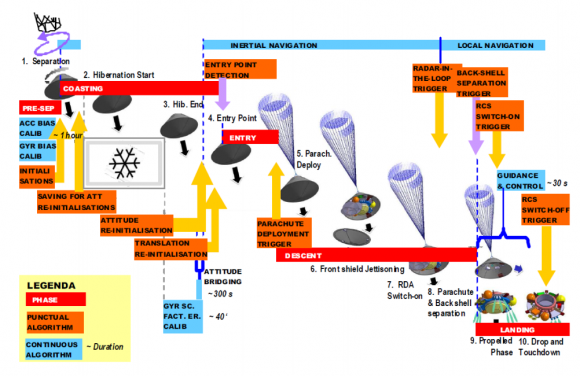
Fases en el descenso de Schiaparelli y los diversos sistemas involucrados. En naranja los algoritmos del sistema GNC que se usaban para ejecutar secuencias determinadas. En azul las funciones del GNC y en rojo las fases del descenso de Schiaparelli (fuente: ESA).
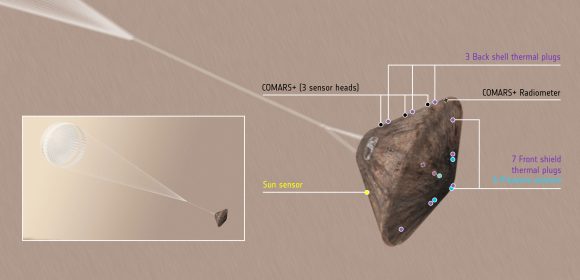
Elementos de la sonda EDM Schiaparelli (fuente: ESA).
En su momento se discutió que el paracaídas italiano pudo ser el causante de las oscilaciones que dejaron fuera de juego a la IMU y que, por tanto, fue este elemento el culpable del accidente. Pues no. La investigación exonera al paracaídas de cualquier culpa y declara que las oscilaciones experimentadas no fueron causadas por ningún problema con este sistema. De hecho, las simulaciones efectuadas por el JPL de la NASA mostraron que en un elevado número de casos la velocidad angular durante la entrada atmosférica podía superar los valores de saturación de la IMU. Del mismo modo, los experimentos de paracaídas en túneles de viento demostraron que el anómalo comportamiento del paracaídas de Schiaparelli entra dentro del rango de lo esperado en la atmósfera de Marte.

Modelo del paracaídas de Schiaparelli en 2015 durante las pruebas en el Ames Research Center de la NASA (fuente: ESA).
Entonces, ¿qué causó las violentas oscilaciones del paracaídas que dieron lugar a la saturación de la IMU? No se sabe, pero la investigación indica que pudo ser debido a la presencia de fuertes vientos en la atmósfera marciana, a un inflado asimétrico o a un comportamiento imprevisto de las bridas del paracaídas. Por otro lado, Schiaparelli también experimentó una velocidad de giro excepcional entre la entrada atmosférica y el despliegue del paracaídas (hasta 18 grados por segundo). ¿Pudo ser esta la causa del desastre? La investigación nos dice categóricamente que no y que estas velocidades de giro inesperadas ya se habían visto previamente en otras misiones, como es el caso de Opportunity. Es posible que una distribución no uniforme del material del escudo de ablación fuera la causante de esta excesiva velocidad de giro.
Por lo tanto, concluye el informe, Schiaparelli se estrelló porque no se modeló adecuadamente el despliegue del paracaídas. De haberlo hecho las oscilaciones que causaron la saturación de la IMU y la posterior cadena de sucesos que culminaron en el impacto del vehículo a 540 km/h no habrían tenido lugar. En todo caso, la investigación destaca que si la IMU no hubiera permanecido bloqueada tanto tiempo o si el GNC hubiese tratado los datos de la IMU de otra manera el accidente tampoco se habría producido, pero hay que destacar que
los contratistas (entre ellos la empresa Española GMV) se ciñeron a los parámetros —erróneos— suministrados por la ESA u otros contratistas. Por ejemplo, se suponía que el tiempo que la IMU podía estar bloqueada era de tan solo 15 milisegundos, cuando en realidad fue de más de 5 segundos. La investigación afirma que si el tiempo de bloqueo de la IMU hubiese sido el previsto Schiaparelli habría aterrizado sin problemas.Y de esta forma concluye la investigación, echando casi toda la culpa a un componente de fabricación estadounidense, lo que permite en cierto modo que la ESA se lave las manos en el asunto. Otra cosa distinta es la interpretación de los hechos, que es más subjetiva. Evidentemente Schiaparelli no se estrelló porque la IMU norteamericana fuese mejor o peor, sino por un modelado incorrecto del despliegue de paracaídas y una falta de comunicación entre los gestores del proyecto y los contratistas.
Así pues caben hacerse varias preguntas:
¿Cómo es posible que nadie comprobase que el tiempo de bloqueo de la IMU era en realidad muy superior a esos 15 milisegundos usados como referencia?¿Cómo es posible que nadie se preguntase qué pasaría si la IMU se saturaba justo durante el despliegue del paracaídas, precisamente la fase de la misión en la que la sonda era más susceptible a sufrir oscilaciones bruscas?¿Cómo es posible que el sistema GNC fuese programado para aceptar unos datos de la IMU claramente erróneos a pesar de que el radar Doppler indicaba otra cosa completamente distinta (resulta físicamente imposible que la sonda esté bajo tierra y al mismo tiempo reciba ecos de radar de la superficie, pero el sistema GNC no fue programado para darse cuenta de esta contradicción)?¿Cómo es posible que se pusiese como velocidad angular límite del sistema unos 150 grados por segundo si había otras simulaciones que demostraban que esta velocidad angular podía superarse fácilmente?Resumiendo, Schiaparelli no se estrelló por culpa de una IMU deficiente, sino por culpa de un presupuesto insuficiente. La cadena de errores de Schiaparelli recuerda a los fallos que se saldaron con la pérdida de la sonda británica Beagle 2 o de la Mars Polar Lander de la NASA. En ambos casos las naves fueron víctimas de un programa de pruebas muy limitado como resultado de disponer de muy poco dinero para desarrollar el proyecto con las mínimas condiciones de seguridad.
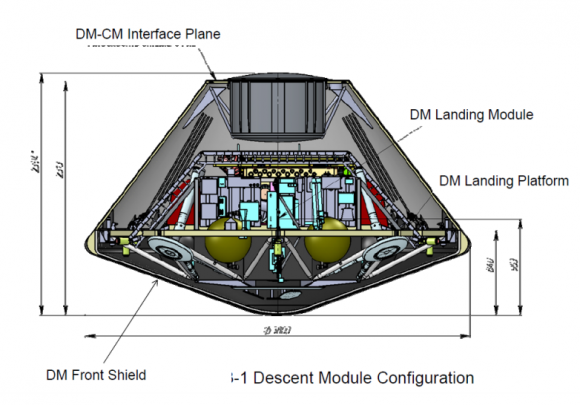
Módulo de descenso de ExoMars 2020, fabricado en colaboración con Rusia (fuente: ESA).
Por supuesto, el informe deja claro, por si acaso alguien tuviera alguna duda, que la misión Schiaparelli fue casi un completo éxito a pesar de su litofrenado involuntario y que nada de esto va a ocurrir con el módulo de descenso de la misión ExoMars 2020, desarrollada conjuntamente con Rusia (recordemos que esta misión debe depositar en la superficie un rover para buscar biomarcadores en el subsuelo marciano). El radar Doppler, el sistema GNC y los modelos atmosféricos y dinámicos de ExoMars 2020 estarán basados en los de Schiaparelli, pero la IMU será diferente, al igual que los paracaídas (aunque el fabricante es el mismo). Confiemos en que hayan aprendido la lección.
-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
En mi opinión la ESA (o mejor dicho si burocrática administración) a querido hecha balones fuera con tal de no asumir que como mínimo el 80% de la culpa fue suya y no del IMU o del paracaídas de EEUU. Es más como supongo que intuiréis cada miembro de la unión europea construyo una parte de la nave (como siempre se hace así para que todos los países puedan sentirse orgullosos diciendo que "
hemos construido tal elemento de esa nave"
Adivinan que parte fue de la que se encargo España......si así es el software encargado del descenso (en las fases criticas) fue desarrollado por la empresa española GMV.
En su defensa (todo sea dicho) el software se ajustó a unas especificaciones determinadas y, en todo caso, habría que buscar el fallo en dichas especificaciones previas (esos 15milisegundos en lugar de los 5 segundos.
Lo que no se entiende es que una saturación de la IMU de un segundo hiciese creer a Schiaparelli que ya había aterrizado. Evidentemente, a la velocidad que iba la nave a 3,7 kilómetros de altura es físicamente imposible que en un segundo pudiera alcanzar la superficie, algo que debería haber tenido en cuenta el sistema GNC. Si la defensa no aporta alguna coartada, está claro que el sistema GNC, y más concretamente su software, sería el segundo culpable del accidente, tal y como se insinuó en un principio Sea como sea, conviene recordar que el software se ajustó a unas especificaciones determinadas y, en todo caso, habría que buscar el fallo en dichas especificaciones previas.
Sea como sea la cuestión es que la ESA ha echado balones fuera (utilizando como cabeza de turco a EEUU) para no decir públicamente que no hicieron los controles de calidad oportunos y que si los hubiesen hecho habrían evitado dicho accidente.
Mención especial a España en este asunto¿Cómo es posible que el sistema GNC fuese programado para aceptar unos datos de la IMU claramente erróneos a pesar de que el radar Doppler indicaba otra cosa completamente distinta (resulta físicamente imposible que la sonda esté bajo tierra y al mismo tiempo reciba ecos de radar de la superficie, pero el sistema GNC no fue programado para darse cuenta de esta contradicción)?
![[facepalm]](/images/smilies/facepalm.gif "facepalm")
Saludos

![[+furioso]](/images/smilies/nuevos/furioso.gif "muy furioso")
![[uzi]](/images/smilies/nuevos2/uzi.gif "uzi")
 nusenuse
nusenuse 

![[beer]](/images/smilies/nuevos2/brindando.gif "brindis")
![[tadoramo]](/images/smilies/adora.gif "Adorando")

![[qmparto]](/images/smilies/net_quemeparto.gif "Que me parto!")


![[burla2]](/images/smilies/nuevos/burla_ani1.gif "burla2")
![[mad]](/images/smilies/nuevos/miedo.gif "loco") ), y su afición y devoción a los cohetes y la exploración espacial no tiene nada que ver con la guerra. Otra cosa es el presupuesto, que se lo dieran por las futuras aplicaciones militares que pudiera tener. Pero ese presupuesto directamente aplicado a la investigación espacial hubiese sido igual o más provechoso.
), y su afición y devoción a los cohetes y la exploración espacial no tiene nada que ver con la guerra. Otra cosa es el presupuesto, que se lo dieran por las futuras aplicaciones militares que pudiera tener. Pero ese presupuesto directamente aplicado a la investigación espacial hubiese sido igual o más provechoso.![[+risas]](/images/smilies/nuevos/risa_ani3.gif "más risas")

![[ginyo]](/images/smilies/nuevos/guinyo_ani1.gif "guiñando")

![[oki]](/images/smilies/net_thumbsup.gif "Ok!")
![[hallow]](/images/smilies/nuevos/hallowen.gif "calabaza")