
Introducción
The Corpora, una empresa Española, ni Japonesa, ni Estado Unidense, ni Alemana, ni Francesa (sí, he dicho E.s.p.a.ñ.o.l.a) está revolucionando los mismísimos cimientos de la robótica tal y como la conocemos hoy en día, ideas revolucionarias, de filosofía “open source” y lo más importante, pensando en todos los presupuestos. Ha llegado el momento de que todos disfrutemos, por fin, de nuestro robot particular de protocolo en nuestros hogares, el futuro ya esta aquí y se le conoce como Q.bo.
Al conocer a los integrantes de The Corpora, empezando por su dueño, Francisco Javier Paz, hemos tenido en todo momento la sensación de estar ante un visionario con las ideas muy claras, su concepto de la robótica es sencillamente exquisita, un romántico al más puro estilo de otros genios que con el tiempo resultaron ser verdaderos revolucionarios y sirvieron de revulsivos en otros ámbitos tecnológicos.
Hemos tenido la suerte de ser invitados a las instalaciones de The Corpora y conocer en persona a Qbo, pero antes de entrar en valoraciones personales sobre la experiencia vivida con Qbo, quisiera profundizar sobre el responsable de tan magno proyecto.
Francisco Javier Paz, un apasionado de la informática y la robótica por partes iguales. Durante toda la entrevista su visión y conceptos de la robótica trasgreden toda las ideas y bases de las mismas que conocemos en la actualidad, esas mismas bases de la robótica que hoy en día son, en gran parte, culpables de la fragmentación y terrible ralentización de esta magnífica práctica y por consiguiente, su escasísima evolución comparado con otras ramificaciones del sector tecnológico.
Y desde años Francisco Javier Paz se pregunta una y otra vez ¿porque conformarnos con una robótica obsoleta y carísima? Sin evolución significativa, con unos precios desorbitados llegando a ser “productos de una exclusividad de libro” con unos robots que aun siendo carísimos no ofrecen nada coherente con la tecnología que disponemos en la actualidad, la mayoría de esos robots comerciales, por ejemplo los kits humanoides, siguen siendo escasos en Inteligencia Artificial o directamente ausencia de la misma, siendo estos robots meros actuadores o imitadores de movimientos.
El impulso de todos estos conceptos novedosos, no serían relevantes sin un sistema operativo robótico (ROS) concentrando todo los esfuerzos en un mismo entorno de programación, creado por Willow Garage, un sistema operativo “open source” bajo linux que se usa en más de cincuenta clases diferentes de robots, desde plataformas de investigación a robots caseros basados en arduino. Willow Garage es un laboratorio de investigación robótica y una incubadora de tecnología dedicada a desarrollar hardware y software “open source” para aplicaciones robóticas personales, su éxito meteórico esta siendo adaptado por todos los fabricantes y centros de investigación.
La alternativa de que se centralice en ROS todo lo programado para determinados robots, y pueda ser adaptado sin dificultad a otros sistemas, es una evolución trascendental en la robótica y todas sus ramificaciones, sensores, parámetros, inteligencia artificial y todo los términos habituales en robótica, sin importar el modelo o unidad robótica que deseemos trasladar dicha información, siendo aquí la verdadera revolución roboticamente hablando, y por fin, dejar de tener que reinventar una y otra vez la rueda cuando hablamos de la robótica, el recorrer y una otra vez el mismo camino ha llegado a su fin, la evolución lógica empieza con ROS y The Coprora lo ha adaptado a Qbo.
He aquí el concepto de Qbo, ofrecer lo que podríamos denominar sin temeridad, un robot social o de “protocolo” según vuestra afinidad con el termino, un robot de crecimiento orgánico, que dependerá en su mayor parte de la filosofía Open Source y de la comunidad creada alrededor de Qbo.
La parte hardware que se utiliza en Qbo, se divide en su mayor parte en material informático del día a día, aquí reside otra de las novedades y filosofía acorde con el concepto de código abierto de la parte software, placas miniTX (dejando la elección de diferentes configuraciones al usuario final), todo material standar, baterías de gran capacidad, sensores ultrasonido y los servo motores son de especificaciones comunes usados en robótica, y un par de webcams normales para los ojos del robot.
Francisco Javier Paz, hablaba durante la entrevista de las infinitas posibilidades a corto y medio plazo con Qbo, por ejemplo en esta nuestra sociedad, donde cada vez somos más individualistas, y muchas personas que viven solas, pueden encontrar en Qbo una presencia que cambiaría su calidad de vida, la capacidad de aprendizaje centralizado en la nube y las miles de aplicaciones podrían aportar a la vida cotidiana tantas utilidades como alternativas se nos presente, pasando por usos domésticos y profesionales para consultas a la wikipedia, o usar el Qbo como un robot de telepresencia con todas sus funciones amplificadas con capacidades multimedia e interactivas, sin olvidar el entretenimiento de toda la familia y un compañero tan entrañable como sorprendente.
Por desgracia el camino recorrido por Francisco Javier Paz y The Corpora, no fue ni es un camino de rosas, partiendo desde una apuesta personal, autofinanciando todo el proyecto que rodea a Qbo, es un camino largo que recorrer, a sabiendas que muchos ojos están puestos en el proyecto de Qbo y que, desde España, no tenga ningún tipo de ayudas, es triste saber que en otros países se darían de tortas para ayudar a nivel estatal mediante ayudas dedicadas al I+D que podrían impulsar este tipo de proyectos a nivel nacional, pero todo sea que la apuesta personal de Francisco Javier Paz termine mudándose fuera de España para poder seguir un proyecto que a día de hoy es 100% Español y que por desgracia termine siendo un proyecto nacido en España y continuado en un país donde sepan apreciar lo conseguido hasta el momento.
El equipo humano de The Corpora, va en la misma sintonía que Francisco Javier Paz, profesionales del sector de la programación, cada uno de ellos en su especialidad, un equipo joven y dinámico, apasionados con sus trabajos y volcados en el proyecto Qbo. Durante la visita hemos tenido la oportunidad de intercambiar algunas ideas y comentarios sobre Qbo, todos los que forman el equipo de programación, sin excepción y valga la redundancia, hablaban con verdadera dedicación y pasión sobre el robot, generando ideas constantemente, cuando uno de ellos estaba terminando uno de los procesos actuales de Qbo, otros del equipo ya estaban maquinando funciones nueva para Qbo, donde el entusiasmo rebosa constantemente en todo el equipo, sin duda Francisco Javier Paz no podía haberse rodeado de mejores integrantes para The Coprora y el desarrollo de Qbo.La entrevista
1º Gremio: El Qbo funcionará bajo linux "ubuntu", y con la plataforma robótica ROS, ¿vendrán los programas instalados de fábrica?, ¿tendrá algún módulo gráfico que facilite la tarea del usuario para moverse en ROS?¿habrá manuales en español?
F.J.P: Los programas podrán ser descargados de nuestra web y habrá mucha información en el foro que próximamente abriremos. Vamos a tratar de que los manuales vayan escritos en varios idiomas. Sobre el front-end tenemos algunas propuestas encima de la mesa para una buena comunicación entre el usuario novel y el usuario avanzado.
2º Gremio: ¿ De Windows hablamos o no?
F.J.P: Por el momento no estamos trabajando en una versión de Windows, pero no descartamos nada a corto o medio plazo.
3º Gremio: Si en la robótica existiera tres niveles de usuarios, bajo, medio o alto, ¿para quién estaría dirigido QBO?
F.J.P: Para todos, Qbo es un proyecto mucho más amplio de lo que pueda parece a simple vista, Qbo esta enfocado a todos los usuarios, pasando por los más experimentados que quieran crear aplicaciones y programar el robot, hasta el usuario intermedio que quiera interactuar con el mismo y sacarle el máximo partido, o simplemente usar Qbo socialmente como centro multimedia, capaz de redactar un email y mandarlo a nuestra lista de contactos o preguntarle la última receta de Carlos Arguiñano.
4º Gremio: ¿Que configuración básica saldrá al mercado y por cuanto? ¿Que placa interfaz se usará para controlar servos motores etc...? ¿ es de propia creación?
F.J.P: Por desgracia debido al retraso del material que hemos sufrido por nuestros proveedores, todavía no podemos barajar unas cifras de precios, debido a ese retraso, tenemos un desajuste importante en el calendario, si bien uno de los argumentos principales que mantendremos siempre, es que Qbo sea un robot inteligente “low coast” y el objetivo de que llegue al máximo de bolsillos posibles será siempre una de nuestras prioridades.
5º Gremio: Viendo las infinitas posibilidades que ofrece el Qbo, se me viene a la mente otros Robots que están consolidándose a nivel docente y universidades de todo el mundo, como el Robot humanóide Nao de la empresa Francesa Aldebaran Robotics, sin embargo y sin querer entrar en comparaciones, no parece que el Robot Nao ofrezca nada que no pueda ofrecer Qbo viendo sus infinitas posibilidades y mucho más barato que Nao, ¿Tenéis intención de impulsar y promocionar Qbo a nivel docente?
F.J.P: Aldebaran Robotics ofrece un producto completamente diferente al nuestro con el robot humanoide NAO, un extraordinario robot que tiene una aceptación excepcional a nivel docente por sus posibilidades de programación y movimientos de articulación más acorde en robótica humanóide.
Nuestro propósito es ofrecer un concepto diferente al robot NAO, centrándonos más en una interacción y sus posibilidades en Inteligencia Artificial, un robot social que con el tiempo podría ser tan imprescindible como hoy día los teléfonos móviles.
A nivel docente, Qbo tendrá mucho que ofrecer, su flexibilidad a la hora de programar y elegir una configuración interna del Qbo, hace de él sin duda un candidato a una plataforma viable para una amplia enseñanza del sector e investigación de la robótica.
6º Gremio: ¿Qué tipo de cámaras se va a usar?, ¿ con qué características? ¿qué frecuencia de procesamiento de imagen dinámica cree que se consigará con la configuración mínima del Qbo?
F.J.P: Como todo en Qbo, las cámaras son Standard. Este tipo de cámaras se usan para sistemas de videovigilancia por lo que su calidad es bastante alta. Se conectan por USB de forma separada aunque estamos a punto de realizar con el proveedor Taiwanes algunos cambios para que ambas cámaras sincronicen a la vez y podamos mejorar algunos algoritmos.
7º Gremio: ¿Cómo piensan comercializar el Qbo?, ¿en grandes superficies, tiendas especializadas o exclusivamente por Internet?
F.J.P: Muchos usuarios nos han trasmitido su inquietud al respecto, si bien somos una empresa pequeña y nuestra capacidad de distribución y venta directa queda limitada, nos gustaría poder ofrecer una configuración básica del Robot desde The Corpora y que sea el usuario final quien termine y elija el corazón de Qbo.
Respecto a los métodos de venta, tenemos varios proveedores interesados en ofrecer distintas configuraciones de Qbo totalmente montado, estamos en constante comunicación con dichos distribuidores, pero debido al mencionado retraso que hemos sufrido, seguimos ultimando estos detalles que se resolverán en el mismo instante que tengamos las piezas de nuestros proveedor asiático.
8º Gremio: ¿Qué tipo de batería usará Qbo y que autonomía calculáis que tendrá el robot?
F.J.P:.Podrá usar dos tipos de batería, plomo o LifePO. La primera tiene un coste muy bajo pero su autonomía y tiempos de carga son bastante elevados. La batería que recomendamos son las LIFE PO que con una carga de trabajo media pueden llegar a durar más de dos horas y media y el tiempo de carga es bajo, también es cierto que su precio puede superar los 100 euros.
9º Gremio: Los vídeos de interacción entre el usuario y el Qbo que se han visto hasta el momento, son realmente impresionantes, ¿dónde está realmente el límite de Qbo?
F.J.P: El Límite es casi una cuestión de evolución orgánica, Qbo y su sistema de aprendizaje centralizado en la nube abre la puerta a un mundo con infinitas posibilidades, así mismo la evolución de Qbo dependerá en gran parte de la comunidad y los usuarios, es emocionante pensar que una unidad Qbo localizada en Australia aprenda nuevas funciones y otros Qbo situados en otras partes del mundo reciban y desarrollen nuevas aptitudes y comportamientos a las pocas horas.
10ºGremio: Si mal no recuerdo, el proyecto The Corpora empezó allá por el 2006, ¿cómo ha evolucionado la empresa y cómo veis el futuro de la misma?
F.J.P: Empezó como un hobby y mira dónde estamos. Yo al proyecto lo llamo “romántico” porque se empezó como un sueño y está a punto de cumplirse. Y lo que nos depare el futuro nadie lo sabe, es un mundo difícil y muy complicado pero algún día alguien debía dar ese paso, y porqué nosotros ¿no?
11ºGremio: Imaginamos que vuestros gastos en I+D y un sin fin de negociaciones con proveedores habrá mermado en diversas ocasiones vuestras ilusiones sobre el proyecto Qbo, añadiendo a todo este trabajo una situación económica complicada a nivel mundial ¿habéis tenido patrocinadores interesantes con visión de futuro o las negociaciones empiezan ahora con el Qbo muy desarrollado?
F.J.P: Hasta hace unos meses todo el proyecto era soportado económicamente por mí hasta que el CDTI nos prestó un dinero ( a devolver ) para poder continuar con el proyecto. Hasta el momento muchas grandes compañías de tecnología se han interesado por el proyecto pero aún no hay ningún tipo de colaboración.
12º Gremio: ¿Empezaran directamente con una comercialización Europea de Qbo o sólo a nivel nacional?
F.J.P: En principio los distribuidores interesados en vender Qbo, son tiendas con distribución Internacional, así que el lanzamiento seria a nivel Internacional.
13º Gremio: Desde los diversos eventos, foros y comunidad robotera ¿Cómo estáis percibiendo la acogida de Qbo?
F.J.P: Una asombrosa y excelente acogida, estamos encantados con todo lo que leemos sobre Qbo en diversos medios de comunicación y foros, desde los mensajes de aliento y felicitaciones, hasta las criticas más ácidas y constructivas, nos encanta por partes iguales, los más críticos con nuestro proyecto nos ayuda a mejorar el concepto y las ideas a desarrollar, para todos ellos sólo tenemos palabras de afecto y agradecimiento.
14º Gremio: ¿Qué tipo de mercado os interesa con más prioridad en el éxito de Qbo?, ¿Mercado doméstico? ¿Docente? ¿Profesional? ¿Los tres al mismo tiempo?
F.J.P: Todos por igual, en primer lugar me viene a la mente los infinitos usos domésticos, desde la persona que vive sola y entra en su casa saludando a Qbo y que este le pregunte como le ha ido el día entablando una conversación de la manera más natural como si el interlocutor fuera otra persona, o por ejemplo pedirle al Robot que nos redacte un mail y este lo mande a nuestra lista de contactos, pasando por la ama de casa que quiera saber X receta y que Qbo le busque la información deseada, sea una receta o por ejemplo le deje a Qbo un mensaje grabado para cuando los hijos entren por la puerta y Qbo lo retransmita, esto solo por citar algunos ejemplos.
Los diferentes usos docentes como he mencionado más arriba, encontrarán en Qbo una plataforma flexible para la enseñanza cubriendo muchas ramificaciones de la robótica.
15º Gremio: Los que vivimos la robótica como una pasión, vemos en Qbo una verdadera “Robolucion” y un salto cualitativo en esta maravilla, al ver este último se tiene la impresión de dar un verdadero salto al futuro y estáis despertando en muchos amantes de la robótica unas expectativas realmente enormes ¿Sois consciente del entusiasmos que estáis despertando en la comunidad robotera?
F.J.P: Despertar muchas expectativas es fantástico, al igual que una arma de doble filo, no quisiéramos que la gente se haga una idea errónea sobre Qbo, por eso en todo momento de su concepción y evolución, hemos realizado comunicados mediante videos de las capacidades reales de Qbo, sin adornos, mostrando la realidad del Robot.
16º Gremio: Siendo sinceros, sabéis de sobra que ya nos habéis vendido Qbo desde hace tiempo a muchos roboteros, pero ¿que le diríais a los más escépticos?
F.J.P: Nuestro propósito es que Qbo sea de utilidad a mucha gente, el público más reticente quizás cambiarán de parecer al ver el Robot evolucionando y que ellos encuentren en Qbo una utilidad en su vida diaria.
17ºGremio: La robótica es sin duda una de las prácticas más completas y el hobby más apasionante que un amante de la tecnología, electrónica, programación se puede encontrar pasando por la IA, sin embargo, la fragmentación de la misma es una de sus lacras más pesadas y que, sin duda, ha frenado su evolución en general de la robótica, el futuro del sector significaría que todos tendríamos que caminar hacia una misma dirección, ¿Siendo ROS y Linux la única ruta a seguir?
F.J.P: Ros es una plataforma de desarrollo open source lo que permite desarrollos mucho más baratos o incluso gratuitos. El tema de la IA es completamente diferente ya que los retos a afrontar son mucho más difíciles debido principalmente a que un sistema IA debe ser fuertemente entrenado y hoy por hoy no existe un sistema distribuido que permita alimentar tal sistema. Los pasos se están dando y es por ello que, por ejemplo, nuestro proyecto si tiene éxito permitirá entrenar un sistema de IA con los datos facilitados por los usuarios. Necesitamos sistemas baratos y accesibles para que la robótica siga avanzando.
18ºGremio: ¿Cómo imagináis la robótica de aquí a corto / medio plazo?
F.J.P: Aún quedan muchas cosas por hacer pero se está avanzando en los últimos años de una forma exponencial. Proyectos como el de Willow Garage y Nao permiten poco a poco ir acercando la robótica al usuario de a pié. Igual que hace 15 años usábamos un Walkman para escuchar música y ahora lo hacemos con un MP3, en breve dispondremos de mascotas robóticas para casa lo que permitirá poco a poco introducir la robótica en casa.
[b]19º Gremio: La comunicación verbal con el Qbo es sólo en Ingles? ¿la consulta de objetos en nube así como aprendizaje tiene alguna otra opción de idiomas?
F.J.P: Habrá varios paquetes de idiomas disponibles, entre ellos el castellano por supuesto, estamos trabajando en dichos paquetes y su transcripción a Qbo.
20º Gremio: Y para terminar, ¿podemos soñar algún día que Qbo termine teniendo piernas en una futura versión...Qbo2 quizás?
F.J.P: Futuras revisiones y ampliaciones de Qbo son totalmente viables, el tiempo lo dirá o quizás sea el propio Qbo quien nos lo pedirá...Descubriendo a Qbo y valoración personal
Al entrar en la sala de los programadores, rodeados de cables, ordenadores, piezas sueltas de Qbo, sensores, carcasas, baterías, apuntes, en fin, lo que mucho de nosotros denominaríamos un verdadero paraíso, allí estaban todos trabajando y perfeccionando aplicaciones y funciones del Qbo, nuestra presencia paralizó durante unos instantes el trabajo de todo el equipo, donde se dedicaron por completo a mostrarnos algunas de las capacidades del Robot.
Qbo estaba allí, mirándonos con una expresividad asombrosa, sus ojos nos seguía atentamente allá donde nos moviéramos.
Lo primero que tuvimos la ocasión de probar, fue la capacidad de Qbo en reconocer a sus conocidos habitual, saludando a Qbo, éste lo miraba y con una velocidad pasmosa reconocía al sujeto llamándolo por su nombre. El reconocimiento facial funciona realmente bien, mejorando considerablemente en velocidad desde los videos publicados por The Corpora hace pocas semanas.
La sensación que se tiene al presentarte a Qbo, que éste te reconozca y te pida que confirmes tu nombre la primera vez, es una sensación extraña y emocionante al mismo tiempo, Qbo tiene una capacidad increíble de querer adoptarlo desde el primer momento que lo ves desempeñando algunas de sus funciones, y esto es sólo la punta del iceberg.
Tuvimos también la oportunidad de verlo moverse de forma autónoma con agilidad, sus movimientos son suaves, resultando especialmente conseguidos los giros silenciosos de la cabeza, con una suavidad impecable, probar alguna aplicación de telepresencia a través de un teléfono móvil con pantalla táctil, pudiendo pasar a control manual en cualquier momento, sus ojos además de retransmitir todo lo que ve Qbo en ese momento, podemos activar una visión panorámica en 3D.
En la parte de atrás de Qbo, se percibe vagamente una tapa que da acceso a las salidas del corazón de Qbo o lo que es lo mismo, las salidas de la placa miniTX, además de una pantalla Led que nos indica en todo momento el proceso que se esta ejecutando en ese momento.
Por la parte frontal, también pudimos cotillear quitando una parte de la coraza frontal del robot, y se veía perfectamente la placa madre como en cualquier CPU, además de una pequeña controladora Arduino donde los diferentes sensores retransmitían la información captada. Todo encajando a la perfección, dejando claro el buen trabajo de diseño de Qbo.
Pero todo esta parte interna, no luciría ni la mitad de bien si no fuera por la sorprendente aleación y calidad de los materiales usados para fabricar el caparazón de Qbo, plásticos con una terminación y resistencia de muy alto nivel, este punto siempre ha sido de una importancia vital para Francisco Javier Paz y The Corpora, que ha dado como resultado una sensación de no estar delante de un juguete y más bien todo lo contrario.
Me gustaría concluir diciendo que mis expectativas personales han sido ampliamente superadas con lo vivido en las instalaciones de The Corpora, Qbo es realmente increíble, entrañable y sorprendente, no tengo adjetivo en Español ni en Francés para describir toda las sensaciones que produce el espectacular salto hacia el futuro que está al alcance de nuestra mano, gracias al espléndido trabajo realizado por Francisco Javier Paz y todo su equipo.Video
http://www.youtube.com/v/vvqJBoGfCUc
Agradecimientos a: Francisco Javier Paz por su hospitalidad y acogida, a todo el equipo humano de The Corpora, al foro de Bipedolandia, a Ramón Mas Alberola y por supuesto, a mi mujer Patricia por su inestimable ayuda en la realización de la entrevista.
La robótica es sin duda una de las practicas más completas y el hobby más apasionante que un amante de la tecnología, electrónica, programación y pasando por la IA que uno se puede encontrar.
Muchos curiosos de esta practica fascinante no se atreven a dar el paso, por no saber por donde empezar, por eso quiero que esta pequeña guía sea de utilidad para empezar en este hobby, intentando citar algunos robots comerciales, kit de auto montaje o simplemente sistemas cerrados que no necesitan conocimientos de electrónica, donde el aprendizaje se hará paulatinamente de manera que según vayamos avanzando en este fantástico mundo disfrutemos de sus infinitas posibilidades.
Esta guía solo pretende dar unas informaciones practicas y una base a la hora de adquirir un primer robot, ofreciendo direcciones de tiendas online de confianza, comparativa de distintos robots, sus precios y características.
Antes de lanzarnos en los detalles, mencionar que esta practica no tiene porque suponer un desembolso extraordinario, no más que otros hobbys, desde unos 90€ podemos tener todo un robot con sensores, programas y un abanico de posibilidades por delante.
Los mas afortunados que disponen de un presupuesto más extenso, tendrán a su disposición una cantidad más amplia de elección, pasando por robots conocidos como “sigue lineas” hasta los fantásticos y más complejos humanoides.
Toda la información que aquí encontrareis es expuesta desde mi experiencia personal y la comunicada por los fabricantes y tiendas de los Robots, esperando que sea de ayuda a algún que otro nuevo venidero en este apasionante mundo.
En esta guía no mencionara técnicas de robotica avanzada construidos por uno mismo, donde el lado romántico de esta practica creando un robot propio, es sin duda una técnica muchísima más avanzada y compleja que necesita un apartado técnico de diseño, pruebas y conocimientos de un desarollador profesional.Así pues, será ante los foros de Elotrolado.net donde la maldición de nuestro hobby se habrá de decidir.
Terminologias a tener en cuenta:
Metodologías de programación robotica:
Que no se asuste nadie!, los distintos métodos de programación de los robots, van desde un entorno de programación visual y amigable donde no se necesita ningún tipo de conocimiento de programación, pasando por un entorno Basic o programación en C, donde serán necesarios unos conocimientos del entorno de programación, aunque estos últimos tienen una base de datos y tutoriales en Internet muy amplia, que cualquier aficionado con ganas puede iniciarse de manera fácil en lenguajes de programación por código, gracias a una multitud de ejemplos.
Tipos de robots
Los Robots conocidos como “sigue lineas”, ofrecen mucho más de su escueta definición de “sigue lineas” están dotados de diversos detectores infrarrojos, proximidad y ofrecen lo esencial para entrar de lleno en la Robotica, suelen tener un precio asequible y plasma a la perfección todos los conceptos de la robotica.
Los Robots conocidos como “No-Humanoides”, es un termino quizás más genérico que puede englobar varios tipos de robots, como los robots sigue lineas, los Robots de tele-presencia, brazos roboticos o Robots de servicio (Aspiradores, video vigilancia), lo único al que se refiere ese termino, es que su aspecto no es humano y no tiene un aspecto propiamente dicho de una persona.
Los Robots conocidos como de “Telepresencia” son aquellos que están dotados de una conexión Wifi y una cámara web, robots que están pensados para actuar directamente con la presencia humana y que suelen ser utilizados para usarlos de comunicador através de una red (o bien privada o Internet), gracias al soporte de los fabricantes, estos robots ofrecen programas para el ordenador y interactuar con ellos usando la red, sea para comunicarse por web cam o actividades de video vigilancia / conferencia, de forma fácil y amigable para el usuario. Estos Robots podrían entrar Robots de Servicio, como los Robots Aspiradores Romba por ejemplo, que están diseñados y pensados para cumplir una determinadas acciones y por defecto, no ofrecen posibilidades de programación abierta sin pasar por un hackeo del sistema. Robots que son útiles para el día a día o que pueden dar mucho entretenimiento como los de tele-presencia, son Robots pensados únicamente para unas determinadas acciones.
Kit de Robots, si bien algunos kit a disposición necesitan un tiempo de ensamblado estos kits están aquí para facilitarnos la vida.
Al tratarse de kits comerciales, encontrareis toda la información necesaria ofrecida por el propio fabricante de dicho kit (soporte oficial) y más gente por Internet compartiendo experiencias con dicho kit, lo cual nos ahorrara muchos dolores de cabeza y nos facilitara mucho encontrar respuesta a cualquier duda relacionada con el mismo.
En su mayoría, estos kit no necesitan ningún tipo de conocimiento especial de electrónica (no piden soldar, ni conocimientos de avanzados de electrónica) estos kit de montaje están pensados para que su asamblado sea fácil y de lo más intuitivo.
Los Robots que vienen ya montados son muy comunes y gozan de gran popularidad entre los aficionados a la robotica, ofrecen la facilidad de no tener que montar ninguna pieza, y es lo único que les diferencia de otros kits, las posibilidades como robots son iguales que los demás robots que vienen en piezas sueltas.
Y para terminar con la distinta terminología robotica y empezar con los diferentes modelos de robots disponibles en el mercado, terminamos esta sección con los Robots conocidos como los Robots “Humanoides”.
Los Robots “Humanoides” son muy populares por su aspecto, complejidad, opciones y posibilidades de movimientos, al tener aspecto humano, por lo general estos robots disponen de una cantidad de articulaciones y micros servos superior a los no humanoides.
Son quizás más caros debido a que son mas complejos que otros robots no humanoides y necesitan más servos y piezas para su montaje.
Los modelos comerciales pensados para aficionados, centros docentes universitarios, tienen a disposición distintos kit comerciales, dejando un amplio margen en el presupuesto de compra, desde los 250€ hasta los más de 2000€, esta es la franja de precios de los robots humanoides más populares y más demandados, esto no significa que para tener lo mejor aya que gastarse 2000€ para tener lo mejor, en la variedad esta el gusto y cada modelo ofrece características que pueden ajustarse más a lo que buscamos.
Empecemos con los Robots No-Humanoides:
Robot Scribbler I y II Precio: 100€
Parallax Inc. introdujo en el mercado mundial el robot de formación SCRIBBLER que puede considerarse la alternativa más fácil, completa y económica del momento actual para aprender Robótica, y que comercializa y soporta técnicamente Ingeniería de Microsistemas Programados S.L.. Basado en el módulo microcontrolador BASIC Stamp 2, como el robot Home Boe-Bot, la estructura, la filosofía y la programación son muy similares.
La primera característica destacable del nuevo robot es que viene completamente montado de fábrica, incluyendo numerosos sensores, motores y complementos que le permiten realizar innumerables y diversas aplicaciones sin añadir ni conectar ningún componente. De esta manera, la caja en la que se comercializa el Scribbler contiene:
Robot: Home Boe Bot Precio: 116€
Bajo la referencia "HOMEBOEBOT" se proporcionan todos los componentes necesarios para construir un completo microbot móvil que le permitirá adentrarse en el apasionante mundo de la microbótica sin necesidad de contar con grandes conocimientos técnicos sobre microcontroladores.
El microbot Home BOE-Bot consiste fundamentalmente en una estructura motriz que se puede adquirir por separado bajo la referencia "BOEBOT", que se gobierna mediante la tarjeta Home Work de Parallax®, la cual incluye un potente microcontrolador BasicStamp® 2 actuando como cerebro de la máquina.
La ventaja de este microbot, respecto al resto de nuestra gama, radica no sólo en su reducido precio sino sobre todo en la facilidad con la que se programa y al excelente tutorial y bibliografía que le rodea. Al haber escogido un BasicStamp® 2 como microcontrolador encargado de gobernar al BOE-Bot, el programador no necesita conocer la arquitectura del micro ni su programación mediante ensamblador, ya que se programa mediante el sencillo lenguaje de programación PBASIC, un lenguaje de alto nivel basado en el lenguaje "Basic" cuya sencillez pone a disposición de cualquier neófito todas las posibilidades de un potente microcontrolador como es el BasicStamp® 2.
Se incluyen todos los materiales necesarios para la construcción del mismo, así como los componentes necesarios para realizar las diferentes prácticas propuestas en el manual. Además la tarjeta Home Work incluye su cable de interface serie y el software para la conexión con el PC.
La alimentación de los motores se realiza mediante un conjunto de 4 pilas tipo RA6 de 1.5V (no incluidas). Por su parte, la tarjeta de control se alimenta mediante una pila de 9V (no incluida).
Robot BoeBot Full Kit (USB) Precio 160€
La solución completa para la construcción y puesta a punto del microbot Boe-Bot (por puerto USB). El kit contiene todos los componentes y accesorios para la construcción de la estructura del robot, la tarjeta de control "Board of Education", módulo BS2-IC, cable usb de comunicación con el PC y el manual de instrucciones de montaje con diferentes ejemplos de aplicación (en inglés). Todo el montaje se realiza en aproximadamente 2 horas.
Robot Sumo-Bot Precio 160€
Es el robot autónomo ideal para intervenir en las competiciones de lucha Sumo. Cumple con las reglas de competición especificadas por Northwest Robot Mini-Sumo Tournament. El conjunto consta de tarjeta de control dotada del BS2, chasis, ruedas, sensores, manual de montaje y ejemplos (en inglés), etc. En resumen, se trata de un Kit completo listo para su montaje y empleo. Se puede adquirir por parejas
Tarjeta de desarrollo de bajo coste que incluye el módulo microcontrolador Basic Stamp2 de Parallax equivalente al BS2-IC con sus 36 instrucciones PBASIC. Todos los componentes son del tipo SMD y van soldados directamente en la placa impresa, de lo que se deriva su reducido tamaño. Dispone de una Board para el montaje de pequeños circuitos y periféricos sin soldadura. Las 16 líneas de E/S (P0-P15) así como las de alimentación (intensidad máxima 50 mA para +5V) son accesibles mediante conector y están debidamente serigrafiadas para su rápida localización.
Se trata de la tarjeta de control donde se montan todos los proyectos y circuitos propuestos en el libro "Diseño Práctico de Microcontroladores para todos". La tarjeta va acompañada del cable serie para conexión con el PC y del software necesario. La pila no está incluida. para realizar experiencias y programas con esta tarjeta no son necesarios grandes conocimientos de Electrónica ni de Informática.
Robot MA-VIN (KIT) Precio: 149€
MA-VIN es un kit de robótica modular, versátil y educativo, con una interfaz de programación visual basada en iconos para los principiantes, y programación en "C" para los avanzados utilizando WINAVR.
MA-VIN ayudará a los estudiantes a desarrollar nuevas aptitudes y los familiarizará con la microelectrónica, programación, robótica, sensores y control.
Aplicaciones:
Detecta y sigue la línea
Sensor de luz: Interacción con la luz
Sensor de sonido: Interacción con el sonido
Busca y encuentra caminos entre obstáculos
Deportes robóticos: fútbol, sumo, etc.
Módulos sensores incluidos:
Display LCD
Display de leds de 7 segmentos
Altavoz
3 microruptores táctiles
Detección de luz
4 x LED
Sensor de tacto
Requerimientos del sistema:
Windows Xp
Intel® Pentium® 3 o superior
1 puertos USB disponible
CR-ROM
256 MB de RAM mínimo
300 Mb de disco duro
Especificaciones técnicas:
Microcontrolador ATMEGA64L
USB 1.1
2 líneas LCD x 8 char
2 Motores DC
4 pilas AAA x 1,5 V / DC 5V
Control remoto opcional
Manual y software en inglés
KIT COMPLETO ROBOT SR1, Precio 600€
Esta es la versión más completa y avanzada del robot SR1, que incluye todo el material del kit básico y del kit avanzado y además añade el cabezal móvil con cámara inalámbrica y antorcha de iluminación. El cabezal se mueve con la ayuda de dos servo motores que proporcionan un movimiento horizontal y vertical. El cabezal puede montar en el la parte frontal, el sensor de distancias por ultrasonidos SRF08, consiguiendo de esta forma tener un sensor orientable que funciona como un sonar de barrido. La minicámara en color incluye además del transmisor, el receptor de audio y vídeo que puede conectarse a cualquier televisión o monitor. Hay disponible un programa gratuito que permite controlar tanto el robot, como la cámara desde un ordenador y ver la imagen de la cámara en una ventana de la pantalla (requiere el uso de una capturadora de vídeo en el PC). Para la comunicación entre el robot y el ordenador es necesario contar con algún radio módem para el PC, ya que el robot incluye solo el modulo propio, no el del PC. Para el ordenador puede utilizar el radio módem S350175 que se conecta directamente en el puerto USB y no necesita alimentación externa. Esta versión del robot SR1 es sin duda la opción más interesante y avanzada de cuantas hay actualmente, convirtiendo al SR1 en el robot de aprendizaje más completo.
Robot Azkar Bot Completo Precio 135€
Ingeniería de Microsistemas Programados presenta a Azkar-Bot, un robot didáctico, programable y explandible orientado a todo tipo de aficionados en general y a estudiantes de grado medio, superior e ingeniería en particular.
Se trata de un diseño pequeño, compacto y totalmente modular que, partiendo del kit básico se puede ampliar con todo tipo de accesorios opcionales que permiten el uso de diferentes tecnologías: GPS, reconocimiento y reproducción de voz, radio frecuencia, etc...
Se construye en torno a estructura abierta de metacrilato de dos pisos donde se alojan los motores, sensores, drivers, tarjeta de control y batería (no incluida). El kit básico consta de:
Estructura de metacrilato de dos niveles
Dos micromotores con reductura de 150:1 y sus soportes o brackets de fijación
2 Ruedas de 42x19 mm con cubiertas de goma que permiten una máxima tracción
Dos detectores IR frontales modelo MSE-S135 para la detección de obstáculos
Un sensor IR de reflexión modelo MSE-S110.2 modificado para el seguimiento de trayectorias o pistas
Un driver amplificador de corriente para los motores modelo MSE-A100
Tarjeta de control PIC'Control que incorpora un PIC16F887 de última generación a 4MHz
Tarjeta de prototipos PIC'Project para el montaje de circuitos y prototipos
Accesorios de cableado y montaje
Kit brazo Robot 5 ejes completo AL5D S300128 precio 550€
El brazo robot AL5D es el mayor de la nueva serie de brazos robóticos metálicos que sustituyen a los antiguos de plástico. Estos brazos tienen todos características muy similares en cuanto a funcionalidad y aspecto, estando la principal diferencia en el tamaño y la capacidad de carga. El brazo esta formado por piezas de aluminio que se acoplan directamente a los servos formando una estructura muy sólida que ejecuta los movimientos con gracia y soltura y una repetitividad muy buena. El brazo tiene 5 ejes, pero se puede ampliar a un sexto eje con el kit de expansión S300137 que añade la rotación de la muñeca. Características Altura máx.: 482 Mm. Carga máx. con brazo extendido: 360 gr. Alimentación 6 V. Este kit incluye todos los componentes necesarios para montar y poner en marcha el robot con una conexión serie a un PC. Incluye la parte mecánica, los 5 servos, la electrónica SCC32 ya montada, el alimentador de 6V, el programa de control RIOS y todos los cables y conectores necesarios para su montaje y puesta en marcha.
Lego Mindstorms NXT 2.0 precio 285€
El surtido de piezas del nuevo MINDSTORMS® NXT 2.0 ha cambiado en muchos aspectos desde la última versión 1.0, más piezas, nuevos sensores, y todo ello para desarrollar 16 desafíos para los nuevos 4 modelos de robots que puedes construir fácilmente con las instrucciones que vienen junto con el nuevo software de programación.
Una gran variedad de elementos LEGO® TECHNIC® se combina con los sensores ultrasónico, de color y presión en la próxima generación de robots intuitivos. Gracias a la Guía rápida incluída, el software de fácil manejo, y las instrucciones de montaje paso-a-paso, tanto los principiantes como los expertos disfrutarán al crear humanoides, vehículos y robots que obedecen nuestras órdenes!
POP-Bot Robot precio 480€
La plataforma de robots POB-Bot es la primera plataforma robótica de arquitectura totalmente abierta y lista para usar. Permite la customización sobre la plataforma de mecánica, electrónica y software de forma muy fácil y sin complicaciones, y que tu robot interactue utilizando visión artificial con una cámara a color POB-Eye que permite reconocimiento de imágenes, entradas y salidas (I/O), y un display LCD.
El software RISBEE para prinicpiantes y las herramientas POB-Tools para usuarios experimentados hacen los POB-Bots una excelente herramienta robótica para un abanico muy amplio de usuarios: Institutos, escuelas, universidades, competiciones, hobby, etc.
Puedes empezar utilizando tu robot con los ejemplos suministrados y gradualmente dejar correr tu imaginación para desarrollar nuevos comportamientos o añadir electrónica para incrementar las capacidades y que tu robot alcance nuevos horizontes.
KIT ROBOT 4X4 ROVER X4E Precio 467€
El rover X4e es un robot móvil todo terreno completamente autónomo que incluye un sólido chasis metálico, la electrónica de control totalmente montada basada en un microcontrolador OOPIC R, un sensor de infrarrojos, un sensor de distancias por ultrasonidos montado sobre un mecanismo posicionador tipo pan and tilt que le permite desenvolverse perfectamente en su entorno. También se incluye una batería recargable con su cargador y seis servos. El montaje se realiza fácilmente sin necesidad de conocimientos especiales y se incluye un disco con programas de ejemplo. Toda la programación se realiza desde el entorno de programación orientado a objetos OOPIC, con cuyo lenguaje resulta muy sencillo realizar diferentes programas.
Moway Robot 2 Precio 175€
Moway es una herramienta educativa. Su objetivo es acercar el mundo de la robótica, tecnología y electrónica a los centros docentes y particulares.
Es una solución completa de aprendizaje, que permite a los estudiantes descubrir la Programación a través de un software sencillo e intuitivo con el que controlarán el robot y sus dispositivos de entrada y salida, desarrollando desde un primer momento sus propios programas.
PRINCIPALES CARACTERÍSTICAS
Conexión directa por USB al robot Moway
1 sensor de luz
1 sensor de Temperatura
4 sensores anticolisión por infrarrojos
2 sensores de linea por infrarrojos
4 Diodos LEDS: 2 superiores, led de freno trasero, led blanco delantero
Acelerómetro de 3 ejes
Altavoz - generador de tonos
Micrófono
Indicador de batería baja
Llave de radiofrecuencia por USB, dispositivo Plug´n Play
1 conector de expansión para conectar:
1. Módulo de Radio Frecuencia Moway (accesorio opcional no incluido)
2. Kit de expansión: sobre el que se podrán añadir las piezas y sensores necesarios para crear circuitos electrónicos propios y realizar diversos proyectos. (accesorio opcional no incluido)
Robots de Servicio (Telepresencia y aspiradores)
Robot Telepresencia Rovio, Precio 300€
El robot Rovio es uno de esos artilugios más propio de una película de frikis (servidor), disponemos de un Robot con tecnología wifi, brazo articulado como base principal de una cámara web incorporada, todo esto montado sobre 3 ruedas omnidireccionales diseñadas para moverse con total libertad o girar 360º sin despeinarse, lo cual los más rápidos ya habréis imaginado cual puede ser su virtud principal, poder controlarlo mediante la red de redes pasando por el wifi de tu casa, desde cualquier parte del mundo y controlarlo mediante cualquier aparato con acceso a Internet, ordenadores, móviles, consolas, pdas ect... Mediante los programas necesarios que vienen con la documentación del Rovio, podremos pasearnos con el Robot en nuestra casa sin estar presente.
Características técnicas de ROVIO:
Batería interna recarga-ble 1 x 6V. 3000 mAh NiMH.
Base de auto-carga.
Ruedas omnidireccionales motorizadas.
Iluminación LED.
Micrófono y altavoz incorporados.
Conexión WiFi (requiere red Wifi en su casa o trabajo).
Dimensiones: 34.29 x 30.48 x 35.56 cm.
Peso: 2.3 Kg.
Robot Telepresencia Spykee Precio 315€
Spykee es un robot de tele-presencia con la más sofisticada tecnología disponible en este campo, su principal diferencia con otros equipos de tele-presencia es su diseño juvenil.
Spykee se puede controlar desde cualquier ordenador PC o MAC a través de una conexión WiFi, ya sea local, o remota (por Internet). Esto da la posibilidad de controlar el robot desde cualquier lugar del mundo a través de Internet.
Especificaciones Técnicas
Compatible con PC y MAC
WiFi / 802.11 b/g
Efectos luminosos en la oscuridad
Compatible con Joystick
Requisitos del PC / software: Windows 2000 / XP / Vista
Requisitos del MAC / software: MAC OS X
Software de código abierto
Detalles del Software: 1.1 Mb /interfaz de usuario en Framework Microsoft.net
Cámara: 640x480. Modo local: 15 fps / modo remoto: en función de la conexión de internet.
Altavoz: 2W / no necesita driver.
Medidas: 22 cm x 32 cm x 22 cm
Robot Aspirador Roomba 581 Preio 555€
El modelo Roomba 581 es el robot más completo de la serie 500 de iRobot, ahora habla en español, y dispone de toda la última tecnología (navegación lighthouse con 3 balizas y programador) e incorpora además un panel de control-programador remoto y varios accesorios adicionales.
Roomba 581.
1 Control remoto con programador. (2 pilas AAA no incluidas)
1 Batería recargable de alto rendimiento.
1 Filtro de repuesto.
1 Cepillo lateral de repuesto.
2 cepillos de cerdas.
2 Cepillos flexibles: para la recogida de polvo y partículas pequeñas.
1 Equipo de limpieza y mantenimiento.
3 paredes virtuales auto-on (con la función "Ligthhouse") (Pilas 2 x C no incluidas) Puede aguantar hasta 6 meses en funcionamiento.
1 Cargador de batería rápido (3 horas carga completa).
1 Base de carga inteligente.
1 Manual de usuario en castellano.
Robots Humanoides:
i-SOBOT Precio 290€
Se trata del robot mas pequeño del mundo en producción, certificado por el libro Guinness de los Records.
Diecisiete (17) servos miniaturizados diseñados especificamente para i-SOBOT le permiten moverse con mas naturalidad que algunos robots humanoides que cuestan muchísimo mas.
Otras características impresionantes de i-SOBOT son la inclusión de un sensor giroscópico, reconocimiento digital de voz (en inglés), movimientos preporgramados, sintetizador de voz con un vocabulario de mas de 200 palabras/frases (en inglés), radiocontrol y programación de movimientos desde el controlador remoto, y está preparado para funcionar y actuar recién extraido por primera vez de la caja que lo embala!
MechRC Pack Educacional Precio 525€
Tiene 17 servos de alto torque y piñonería metálica y 2 baterías LiPo de mas de una hora de duración. Tiene un precio muy inferior que otros robots de similares características y no es necesario ningún conocimiento ni habilidad especial para utilizarlo. Nada más sacarlo de la caja es posible ejecutar desde su control remoto mas de 100 movimientos preprogramados incorporados y sonidos.
Características:
Servos con piñonería de metal y carcasa transparente que permite observar su interior.
17 servos de 180º de giro y de 13 Kg/cm de torque!
Altavoz incluido en el robot para reproducir audio.
Mas de 100 movimientos pregrabados en el robot.
Interfaz 3D visual como entorno de programación extremadamente fácil e intuitivo.
Con actividades y propuestas educativas para el uso en el aula como herramienta de aprendizaje.
2 baterías LiPo de duración aproximada de 1 hora cada una.
Adecuado a partir de 14 años.
Cónsola de control remoto incluida.
Tamaño: 36 x 32 x 15cm
RoboBuilder 5720T Precio 586€
Con RoboBuilder 5720T podrás implementar de forma fácil y guiada, en menos de una hora, un increible robot humanoide de 16 grados de libertad, o un perro-robot, o un dinosaurio-robot, o tus propias creaciones robóticas.Los resultados estéticos de los robots son extraordinarios y sin competencia en plataformas similares, con formas y perfiles redondeados y estilizados, y con transparencias luninosas gracias a los leds rojos y azules superbrillantes residentes en cada uno de los 16 servomotores transparentes, y que se pueden combinar para generar tónos rosados o púrpura. Ver los siguientes vídeos:
Contenido del kit 5720T del sistema RoboBuilder
1 x unidad central de control RBC (con sistema de voz)
12 x actuadores wCK-1108T (8kg/cm) transp. con LED
4 x actuadores wCK-1111T (11kg/cm) transp. con LED
1 x Cabeza (Con sensor distancia PSD)
8 x piezas de estructura transparentes (5 tipos)
71 x juntas (12 tipos)
20 x cables
1 x cable RS-232 para PC
1 x Alimentador de potencia
1 x Controlador remoto
1 x conjunto tornillos y tuercas
1 x destornillador
libro guía de usuario y CD con soft
Robonova-I Precio 699€ (Version montada: 899€)
Monte y ponga en funcionamiento un robot humanoide mediante un detallado manual paso a paso, como solo se podía hacer hasta ahora en universidades y centros de investigación científica avanzados. Por medio del software incluido en el kit también los principiantes pueden fácilmente montar el robot y llenarlo de vida.
Robótica para principiantes!
Se disfruta desde el principio.
No precisa conocimientos especiales de informática o de programación.
Catch & Play - mover el robot y gravar, ya esta hecho el primer movimiento!
Todos los componentes para poner el robot en práctica estan incluidos en el kit
La mecánica e el software están perfectamente adaptados entre si.
Toda clase de movimientos desde el mando a distancia con el programa proporcionado.
Robótica para expertos!
Ampliable conforme va adquiriendo conocimientos
La placa de control permite múltiples ampliaciones
La mecánica es módular y se puede adaptar según las futuras necesidades
ROBONOVA-I es una plataforma de desarrollo abierta
Robusto y atractivo
Soportes de aluminio anodizado
16 Servos digitales con piñonería de Karbonite
Aspecto profesional
Bioloid Premium Kit Precio 1056€
El Kit Premium del sistema flexible escalable BIOLOID se sustenta en el gran éxito del kit Bioloid Comprehensive y lo mejora sustancialmente debido al Gyro incluido (con control de equilibrio dinámico), las Baterías Lipo de 11.1V que suministran mas potencia, el nuevo controlador CM-510 (con 6 puertos A/D adicionales de expansión), los nuevos sensores descentralizados de distancia, los nuevos "frames" o piezas estructurales de PVC mucho mas ligeros y resistentes, el nuevo software de programación RoboPlus, el interfaz USB2Dynamixel y el control remoto Gamepad RC-100 con ZigBee.
1 x Nuevo controlador CM-510
18 x Servos Dynamixel AX-12
2 x Sensores IR objetos
1 x Sensor preciso distancia Sharp
1 x Sensor Gyro 2 ejes
Premium Frameset (estructuras)
1 x control remoto RC-100
1 x par Zigbee ZIG-110: Oferta limitada
1 x USB2Dynamixel
1 x Alimentador de potencia
1 x Batería recargable LiPo
1 x Cargador Batería LiPo
CD con Software RoboPlus
Guía Rápida impresa 3 humanoides distintos
Kondo Kit KHR-3HV Precio 1350€
La nueva línea del modelo KHR-3HV tiene novedosas características de tamaño, diseño, frames, servos y grados de libertad. Tiene 17 servos pero es expandible con 5 servos adicionales hasta 22 servos en total. En el kit básico estos 5 servos adicionales són falsos y sólo tienen la carcasa.
Con el total de 22 servos (17+5) hacen a este robot humanoide único en el mercado.
La nueva placa controladora RCB-4 permite controlar hasta 35 servos en protocolo serie (Daisy-Chain) que posibilitan reducir el número de cables y prevenir problemas de desconexión opyimizando la ruta de cableado.
Es compatible con ICS3.0 protocolo serie de servos (opera a 1,25Mbps) y con una gran veriedad de accesorios y sensores opcionales. Incluye distintos puertos de extensión (10 x A/D y 10 x PIO) que permite usar una gran variedad de sensores y opciones de extensión.
KT-X Standard (17 servos) + gamepad Precio 1399€
El robot está diseñado para ofrecer entretenimiento y aprendizaje a bajo coste, toda una alternativa a a robots de gama mas alta con una combinación de diseño e ingeniería robótica de última generación.
KT-X es la primera plataforma robótica de su clase en ser distribuida en EEUU y Europa que reune las siguientes características exclusivas:
Puede ser controlado utilizando un gamepad standard PS2.
Es muy simple de utilizar.
Ofrece interminables horas de entretenimiento.
El robot es capaz de caminar, correr, saltar, y levantarse del suelo cuando está tendido boca arriba o boca abajo. Mide 33 cm de altura, tiene 17 servos (17 grados de libertad), un poderoso procesador HV de 60 MHz con 512KB ROM / 64KB RAM y se suministra precargado con mas de 75 movimientos acrobáticos.
El robot se suministra con una interfaz de programación increiblemente fácil de utilizar, que es la mas intuitiva hasta la fecha y no requiere experiencia previa en programación o robótica.
Robovie-M V3 Precio 2499€
Robovie-M V3 es actualmente el robot humanoide mas espectacular del mercado para los verdaderos fans de los robots de alta tecnología. Está diseñado con un cuerpo fuerte y bien balanceado, construido con servos de alta potencia, una placa contoladora Hitachi H8/3687 20 MHz, y viene con dos gyrosensores externos, haciéndolo el top de los robots modernos.
Este robot también viene con un acelerómetro incorporado (sensor de inclinación) que detecta cuando el robot humanoide cae al suelo, permitiéndole levantarse por si mismo y recuperar el equilibrio, y no importa si se ha caido de espaldas o frontalmente. El acelerómetro también trabaja con los gyros para mantener el robot balanceado cuando está en acción. No pierdas la oportunidad de construir tu propio robot personal REAL y enseñarlo a tus amigos.
No te preocupes por los programas, el ROBOVIE-M V3 viene con 70 programas predefinidos, haciendo la programación y la configuración fácil para todo el mundo, aunque si lo deseas lo podrás programar según tu propio criterio, y controlar via un control remoto o un PC.Fin
Espero que esta guía sea de utilidad para futuros roboteros y encuentren la información necesaria en esta guía para adquirir su primer robot o hacerse una idea aproximada de lo que buscaís.
A continuación dejo las fuentes donde encontrar todos los robots mencionados en esta guía, al igual que encontrareís informacion más detallada sobre otros modelos de robots, al igual que más material de utilidad (fotos, videos, carracteristicas)
www.superrobotica.com
www.ro-botica.com
www.msebilbao.com
Hilos en EOL sobre robots:
hilo_review-robot-rovio_1518110
hilo_scribbler-robot-programable-algun-aficionado-al-tema_1208400Asi son las cosas y asi se las hemos contado
Para todo lo demás, Elotrolado.net
"Robotodologia"
Robot Rovio: Primer contacto
La empresa WoWWee presento hace un par de años un robot de los llamados de «tele-presencia» con el nombre de Rovio, sin duda muchos amantes de la ro-botica se fijaron en él por su diseño y características, el precio sin embargo dejo a más de uno mirando pá cuenca (400€ - 450€) ahora se puede conseguir por la mitad o menos.
Pasado un par de años desde su presentación y esperando que me llegue el turno (bajón de precio y comprado fuera de España) tengo la oportunidad de probar este robot con forma de vehículo lunar.
¿Que es Rovio y para que sirve?
Básicamente todo estos artilugios no tienen una utilidad vital en nuestro día a día, no más que cualquier otro entretenimiento analógico-digital, jugar, trastear, experimentar y aprender, no necesariamente por este orden.
Lo comprobe en su día con el Robot Scribbler de la factoría Parallax Inc un robot totalmente programable dejando la entera creatividad de la mano del propietario, programable al 100%, todavia pulula por mi casa persiguiendo al gato.
En este caso que nos ocupas, no estamos hablando de algo muy distinto al Robot Scribbler, pero quizás si es algo más enfocado a un publico más comercial.
Todos mis respetos al publico comercial, me refiero a que no se necesitan conocimientos de ro-botica avanzada para manejar un Rovio, pues en eso consiste su argumento principal de marketing de venta, «vigila tu casa u oficina mientras no estas» lo cual no quita que este Robot ofrezca unas posibilidades de entretenimiento muy interesantes y como siempre la scene es sin duda una alternativa suculenta para los que no se conforman con lo oficialmente oficioso.
Al tema, El robot Rovio es uno de esos artilugios más propio de una película espacial o de 007, disponemos de un Robot con tecnología wifi, brazo articulado como base principal de una cámara web incorporada, todo esto montado sobre 3 ruedas omnidireccionales diseñadas para moverse con total libertad y girar 360º sin despeinarse, lo cual los más rápidos ya habréis imaginado cual puede ser su virtud principal, poder controlarlo mediante la red de redes pasando por el wifi de tu casa, desde cualquier parte del mundo y controlarlo mediante cualquier aparato con acceso a Internet, ordenadores, móviles, consolas, pdas ect... Mediante los programas necesarios que vienen con la documentación del Rovio, podremos pasearnos con el Robot en nuestra casa sin estar presente,
¿Quillo! y zi me quedo zin batería?
Esto es casi imposible que suceda, salvo que el perro o el gato ataque al Rovio (o la jefa lo tire por la ventana) y este ultimo no pueda llegar por si solo una vez que detecta el “punto de no retorno” por falta de batería (Solo de escribirlo me emociono toa), él mismo volverá solo a su base de carga para su próxima salida programada o conducido por nosotros.
Mencionar que Rovio es programable, por lo tanto cualquier proyecto imaginable más propio y tipicos de foros de robotica puede llevarse a cabo como cualquier otro Robot de programación abierta.
Características técnicas de ROVIO:
Batería interna recarga-ble 1 x 6V. 3000 mAh NiMH.
Base de auto-carga.
Ruedas omnidireccionales motorizadas.
Iluminación LED.
Micrófono y altavoz incorporados.
Conexión WiFi (requiere red Wifi en su casa o trabajo).
Dimensiones: 34.29 x 30.48 x 35.56 cm.
Peso: 2.3 Kg.
Requerimientos configuración inicial:
Ordenador PC compatible, Pentium III o superior, 256Mb RAM.
Sistema operativo Windows XP o Windows Vista.
Conexión USB.
Router Wifi.
Requerimientos para operación remota
Ordenador, PDA o consola con navegación web (Internet Explorer 6 o superior, Mozilla Firefox 1.5 o
superior, Safari 3.0 o superior)
Conexión de banda ancha a Internet
Incluye:
Batería NiMH recarga-ble incluida 1 x Estación de carga con "TrueTrack Beacon" ( Sistema propio que le ayuda en la navegación, para zonas amplias o con distintas habitaciones, puedes adquirir más Truetrack Beacon,son opcionales) *
3 x Rueda Omni-direccionales
1 x Cámara en cabecera motorizada VGA
Iluminación LED
1 x Altavoz incorporado
1 x Micrófono incorporado para audio bidireccional (depende de la red y los dispositivos conectados en tu ordenador)
Conectividad USB
Conectividad Wi-Fi (802.11b and 802.11g)
Por lo pronto hemos intentado instalar el soft que acompaña el Rovio, pero por lo visto con un Windows 7 64 Bit te dice que nanai de la china.
¿Solucion?
Crear una conexión via wifi (Ad hoc) con el robot y mediante una configuracion que viene en el manual es posible usarlo, a la espera de poder encontrar una alternativa menos coñazo el Ravio funciona de maravilla.
A falta de probar el programa en el iPhone y otros detalles, queda dicho que el invento funciona mejor de lo que esperaba.
Aqui dejo unas fotos del juguete:
[spoiler]
Actualizado:
He encontrado por la Web el manual de usuario en Castellano en PDF:
http://www.filefactory.com/file/b444442/n/Rovio_ManualES_100309_Baja.pdf
Programas:
Estoy probando varios programas de control remoto no oficiales y algunos son de pago y en sus versiones de prueba son demos van con limite de tiempo, como el Rovio Comander, que no pasa de los 300 segundos y con la mayoria de las opciones desactivadas, al igual que RovioRemote (limitado en tiempo y opciones desactivadas) al menos que paseís por caja, por lo tanto no me interesan mucho por no decir nada, sobre todo cuando hay alternativas gratuitas y de libre distribucion igual de bueno que los mencionados, como es el caso de Rovio Direct:
Se trata de la version 1.2, la ultima que a salido y tiene multitud de opciones, muchas más de las que permite el control oficial por Ad Hoc.What is RovioDirect?
RovioDirect is an alternative freeware for remote controlling your WowWee Rovio webcam robot. It directly supports access and steering of the robot by the keys of your keyboard. Additional features are supported which you won't find in Rovios integrated html interface. For e. g. full screen view, gained push to talk two way audio, playing predefined sounds, manual driving with obstacles avoiding, animated blue lights, motion detection, turns of 90 or 180 degree and precision control of the camera arm.
Which keyboard keys are usable?
W, up
Robot moves forwards.
S, down
Robot moves backwards.
A, Ctrl+left
Robot moves to the left.
D, Ctrl+right
Robot moves to the right.
Q, left
Robot turns to the left.
E, right
Robot turns to the right.
Shift
Press and hold Shift for a slower movement and ignoring obstacles.
1
The camera moves to position 1.
2
The camera moves to position 2.
3
The camera moves to position 3.
PageUp
The camera moves a smal step upwards.
PageDown
The camera moves a smal step downwards.
R, 4
Robot turns 90 degrees to the left.
T, 6
Robot turns 90 degrees to the right.
Backspace, 5
Robot makes a turn by 180 degrees.
F, 7
Robot toggles the front light.
Space
Press and hold spacebar to record your voice.
Release spacebar to transfer your voice to the robot speaker.
H, 8
Robot is playing an adjustable predefined sound on the robot speaker.
See config.ini for more information.
Y
Robot is playing a "Yes" on the robot speaker.
N
Robot is playing a "No" on the robot speaker.
F2, 9
Robot is starting the "going home and dock" action.
PrintScreen
RovioDirect is taking a snapshot and sending it to the clipboard.
Is it possible to install my own sound files in RovioDirect?
Yes, place your own sound files in the subdirectory "sounds" in the RovioDirect folder. The sound files need to be in Wave format with 8000Hz and 16bit mono.
Aqui dejo el enlace de descarga: http://filefactory.com/file/b43e2hd/n/RovioDirect1.2.exe
Configuracion del rovio para acceder desde internet.
Lo primero es crearse una cuenta (doy por hecho que pocos tienen ip fija) por ejemplo en: http://www.dyndns.com/
Una vez creada la cuenta solo queda configurar el Rovio desde su panel de control y descargarse el manual del Rovio en cristiano:
Manual de usuario en Castellano[/b] en PDF:
http://www.filefactory.com/file/b444442/n/Rovio_ManualES_100309_Baja.pdf
Si no teneís lios con los puertos deberia de funcionar tal y como indica el manual de usuario, todavia no he podido probar algunas opciones como la comunicación por voz usando el robot o el modo vigilancia configurando el envio de fotos automaticos al mail.
Pero por lo demás a sido menos complicado de lo esperado, aunque mentalizaros que este tipo de configuraciones llevan su tiempo.
Aquí algunas capturas y un video chorra:
[spoiler]
Video:
http://www.youtube.com/watch?v=ra9YRX9Zp1k
Llevo tiempo queriendo iniciarme en plan aficionadillo al tema de la robotica en plan "sencillo" para empezar, despues de varios dias informandome, esta mañana he echo un pedido por internet del ROBOT SCRIBBLER, estaba entre ese y el MOWAY, tambien en unas carecterisitcas parecidas para iniciarse en el tema de la robotica, pero al final me decante por el Scribbler por su versatilidad a la hora de trastear con él.
Aqui dejo un resumen del articulo en cuestion:
Parallax Inc. introdujo en el mercado mundial el robot de formación SCRIBBLER que puede considerarse la alternativa más fácil, completa y económica del momento actual para aprender Robótica, y que comercializa y soporta técnicamente Ingeniería de Microsistemas Programados S.L.. Basado en el módulo microcontrolador BASIC Stamp 2, como el robot Home Boe-Bot, la estructura, la filosofía y la programación son muy similares.
La primera característica destacable del nuevo robot es que viene completamente montado de fábrica, incluyendo numerosos sensores, motores y complementos que le permiten realizar innumerables y diversas aplicaciones sin añadir ni conectar ningún componente. De esta manera, la caja en la que se comercializa el Scribbler contiene:
* El robot completamente montado
* Un cable serie para conectar el robot con el PC
* Guía de Usuario
* CD-ROM con documentación y programas necesarios
El temor de muchas personas a tener que ensamblar pieza a pieza el robot con sus componentes eléctricos, electrónicos y mecánicos, como sucede con el Home Boe-Bot, desaparece con el Scribbler, añadiendo una gran robustez y seguridad de funcionamiento. La carcasa, de excelente material plástico, incorpora los siguientes componentes que vienen conectados al módulo microcontrolador.
* 3 sensores de luz foto resistivos
* 2 emisores/detectores de infrarrojos para detectar objetos
* 2 transductores de infrarrojos para detección de líneas y códigos de barras
* 2 motores DC independientes
* 1 sensor de protección de motores
* 1 altavoz para generar sonidos y notas musicales
* 1 soporte de sujeción de un rotulador para dibujar
* 1 puerta serie para conectar el cable serie de conexión al PC
* 3 LED indicadores
* 1 porta-pilas para 6 pilas AA de 1,5 V alcalinas, normales ó de NiMH.
PROGRAMACIÓN DEL SCRIBBLER
Se conecta al PC mediante un cable que se conecta al puerto serie o al USB con un adaptador, a través del cual se soporta la programación de la memoria del robot y la transferencia bidireccional de información.
El PC debe trabajar con Windows® 2000/XP y disponer de un puerto serie, aunque también, con un adaptador serie/USB, puede ser suficiente un conector USB. Una vez efectuada la grabación del programa editado en el PC sobre la memoria del Scribbler, se puede desconectar el cable para que ejecute el programa el robot de forma autónoma e independiente.
Existen dos formas de confeccionar los programas de aplicación:
1ª. De forma gráfica e intuitiva usando el programa Scribbler GUI (Interface Gráfico para el Usuario), que viene incluido en el CD-ROM que acompaña al robot, o bien puede recogerse desde http://www.ScribblerRobot.com . No se precisa ningún conocimiento.
2ª. Con el lenguaje de alto nivel PBASIC, idéntico al usado con el robot Home Boe-Bot. Se precisan muy pocos conocimientos de Informática y está recomendado para usuarios más avanzados.
Mediante el Interfaz Gráfico (GUI) en la ventana del PC se muestra una colección de bloques o ladrillos a todo color, cada uno de los cuales representa una acción posible del robot. También existe una zona donde se deben colocar ordenadamente los ladrillos que van a configurar el programa de aplicación. La confección del programa es tan fácil como ir arrastrando con el ratón de forma ordenada, los ladrillos o acciones que se desea vaya efectuando el robot. Al colocar cada bloque de acción aparece en la pantalla una pequeña ventana para especificar todas sus características, por ejemplo, si se pone el bloque de movimiento hay que especificar la dirección, el tiempo, la velocidad, etc...
Para facilitar al máximo la iniciación en el manejo del Scribbler y la de todos sus recursos, su memoria viene pre-programado de fábrica con una colección de ocho programas de demostración, que son los siguientes:
+ DEMO 0: Sensores de luz
+ DEMO 1: Buscando la luz
+ DEMO2: Detectando objetos
+ DEMO3: Esquivando obstáculos
+ DEMO4: Sensor de línea
+ DEMO5: Siguiendo líneas
+ DEMO6: Dibujando figuras
+ DEMO7: Simulando una ambulancia
Aqui mi primer robot bipedo! un precioso Robo Builder 5710K Black Series, Es el modelo (s03), última versión con el piñón final de los servos metálicos.
1 x unidad central de control RBC (sin voz)
12 x actuadores (servos) wCK-1108K (8kg/cm)
4 x actuadores (servos) wCK-1111K (11kg/cm)
1 x Cabeza (Sin sensor distancia)
8 x piezas de estructura (5 tipos)
39 x juntas (12 tipos)
20 x cables
1 x cable RS-232 para PC
1 x Alimentador de potencia
1 x Controlador remoto
1 x conjunto tornillos y tuercas
1 x destornillador
libro guía de usuario y CD con soft
Además de lo que trae el Kit por defecto, también hemos adquirido: 2 servos adicionales wck 1111k (para poder montar la araña) + una cabeza con sensor de distancia de la marca Sharp.
Sinceramente nos esperábamos un robot menos impresionante, sin desmerecer otros modelos que también estuvimos tanteando, el aspecto de este RoboBuilder esta muy logrado, y algo que nos ha sorprendido mucho es el peso de este ultimo, no sabíamos que estos estos pequeños robots humanoides pesaran tanto y da una sensación de robustez bastante impresionante, su peso debe oscilar entre 4 y 5 kilos, para unos 27 CM...
Esta parte de la robótica es un salto importante a los tradicionales sigue lineas, su complejidad y posibilidades dejan percibir muchas horas en este gran hobby.
Las comparaciones no vienen al caso, pero desde los anteriores robots que tuve Rovio y Scribbler, el precio de los humanoides son más caros por lo general que otros robots no-humanoides.
Si bien el primer detalle que impacta después de su precio (Este modelo ronda los 500€) es la parte de ingeniería y diseño, la integración de todo los elementos para un funcionamiento que implica tantos detalles diferentes, desde la calidad de los microservos y controladora, pasando por el anclaje de toda las partes de robot, de forma sencilla, fiable y resistente.
Todo esto no daría un producto final de excelente calidad si no estuviera apoyado en la parte más importante de un robot, la programación.
Los distintos métodos de programación del RoboBuilder son para todo los gustos:
Pasando por el MotionBuilder, Los movimientos "motions" se determinan por las posiciones de los servos que se pueden ajustar mediante controles gráficos, entrando sus valores numéricos directamente, o una escena se puede crear por aprendizaje mediante el método de "posición y captura", donde el robot se posiciona manualmente en la posición deseada moviendo sus articulaciones, y se registra y guarda cada posición. No es necesario tener conocimientos de programación para generar movimientos complejos.
El ActionBuilder, este ultimo permite al usuario programar la lógica y comportamiento del robot mediante sentencias del tipo "if-then" para determinar las acciones del robot. Permite utilizar como criterios los estados del sensor de distancia, del sensor de sonido, los estados de los actuadores, los botones del mando del controlador remoto, o los botones del módulo controlador. Estas condiciones se utilizan para disparar un movimiento, tiempos de espera, o para saltar a otra línea del programa.
El wCK tools es una aplicación de interfaz gráfica de usuario para todas las funciones avanzadas de los módulos actuadores wCK. Está indicada para los usuarios avanzados ya que contiene una información muy densa y completa para conocer mediante sus funciones como son de inteligentes y optimizados los comportamientos de los módulos actuadores wCK y ajustar el control PID.
Y para terminar el Microsoft® Robotics Developer Studio, una plataforma de programación robótica para crear y depurar aplicaciones robóticas.
En el próximo reportaje sobre este robot humanoide, analizaremos más a fondo su funcionamiento en general, programas y posibilidades.
Y para terminar el amigo Bender dándole una bienvenida como se lo merece:
Kondo Advanced Robot History
La empresa Kondo Cagaku CD LTD no son lideres en robótica por casualidad, ¿o si? en principio tampoco fue ese su cometido...
Pocos saben hoy donde inicia la empresa la aventura en la robótica humanoide.
Nos remontaremos 10 años atrás, corría el año 2001 en Japón, la empresa Japonesa Kondo Cagaku CD LTD ,fabricantes y distribuidores de servos y tecnología RC de alta calidad, muy conocidos en el ámbito y hobby de los aficionados al radio control, aviones y coches en su mayoría.
Ese mismo año 2001, la empresa noto bastante rápidamente después de pocos meses, que uno de los modelos de sus servos, se vendía en cantidades inusuales, pues se entiende que una persona compre un o dos servos de repuesto, pero cuando particulares hacían pedidos de 20 a 30 o más unidades y esto se repetía de tal manera que la empresa tuvo que cuadriplicar la producción de dichos servos para atender a la demanda, la empresa empezó a preguntar a las tiendas distribuidoras y clientes para que tanto pedido de un mismo modelo de servo.
La sorpresa fue mayor cuando descubrieron que aficionados a la robótica estaban usando esos servos para construir “extremidades y músculos” para construir robots humanoides.
Lo cual produjo en la directiva de la compañía, una decisión muy importante que debían de tomar, entrar o no entrar de lleno en el mundo de la robótica, si bien mucho material existente estaba al alcance de su mano y las posibilidades en material no iba a ser un problema, necesitaron un presupuesto en I+D palpable para entrar correctamente en el mundo de la Robótica y no tener perdidas astronómicas.
Mientras empezaron con un I+D sin hacer temblar los recursos económicos de la compañía, la empresa decidió entrar con buen pie pero con cautela en el mercado de los Robots Humanoides, y de todos es sabido que los Japoneses son gente seria y les gusta el trabajo bien echo, dicho y hecho, empezaron facilitando el montaje de los servos a los aficionados a la robótica, comercializando un modelo de servos con valores parecidos a los que interesaba a sus clientes, pero con facilidad de cara al montaje de los servos en los robots de la empresa Robo-One.
Esta primera aproximación voluntaria fue acogida por un éxito sin precedentes entre los aficionados a la robótica y para la empresa, y el nombre de “Kondo” ya era sinónimo a los pocos meses de calidad en material para Robots Humanoides.
Mientras tanto los encargados del I+D de la compañía, ya tenían pensado cual era el próximo paso en el sector de la robótica humanoide y comercial. Un Kit Robot Humanoide asequible y de calidad para las competiciones de Robots Bípedos, siempre tan popular por el país del sol naciente.
Para ello tuvieron que hacer hincapié en todo un proceso que fue laborioso en cuanto a estudio y desarrollo, aquí la parte I+D tuvieron varios enigmas que resolver, ¿que controladoras usar?, programas de desarrollo del soft de programación, diseño del robot...Todo con el objetivo claro a la par que complicado, nada mas y nada menos que poner en el mercado un Kit humanoide automontable, de gran calidad en piezas y componentes, y a un precio razonable.
Difícil tarea, "bueno bonito y barato" en robotica incluso hoy en dia es una utopia.
Pero como buena empresa Japonesa y la filosofía que les caracteriza, Kondo Cagaku CD LTD puso a la venta en Junio del 2004, el primer Kit comercial de robótica humanoide llamado Kondo KHR-1.
Una maravilla tecnológica que hoy día sigue siendo un Robot Bipedo de referencia en muchas competiciones robóticas, obviamente los distintas versiones posteriores fueron mejorando una primera versión llena de calidad.
Aquel primer modelo arraso en ventas por cumplir con la idea inicial de la empresa, ofrecer algo “bueno bonito, barato y de calidad” términos en robótica que no solían ir de la mano por aquellos años, al menos que uno se montara su propio robot humanoide, no sin dificultades y exento de problemas.
Así pues, el Kondo KHR-1 con sus 17 servos, una controladora RCB-1 de 8 Bit, programas de interfaz grafica, conexiones al PC y un precio relativamente barato para lo que suponía un Robot de estas características, Kondo Cagaku CD LTD entraba así en el sector de la Robótica de forma espectacular, siendo hoy un producto de referencia entre los roboteros y así mismo, uno de los organizadores y patrocinadores de muchos eventos de esta índole.
Fin
En Robótica al igual que otras muchas actividades relacionadas con la informática, uno de los problemas más comunes que se topa un aficionado y no tan aficionado (centros docentes y investigación robótica) es toparse con la incompatibilidad de los programas propietarios de los Robots con los sistemas operativos menos obsoletos, leáse Windows Vsita o Windows7.
La mayoría de estos programas están pensados para funcionar bajo el inmortal WinXP y por mucho que el "nuevo" W7 tenga una opción de lanzar programas o instalaciones con dicha compatibilidad, este parche deja en evidencia la mayoría de las veces en este tipo de programas técnicos, una gran inestabilidad, causando la mayoría de las veces, cuelgues inesperados o perdida de información.
Dicha incompatibilidad se multiplica si hablamos de la versión X64 por ejemplo, siendo la versión Win7 X84 algo mas estable pero sin ser funcional y en algunos casos como el Kondo-KHR2 por ejemplo, directamente la comunicación entre el Robot y el PC es nula.
En mi caso me he topado con este problema siempre que he adquirido un Robot, sea desde el sigue lineas Robot Scribbler, pasando por los modelos de Telepresencia Rovio y Spykee y llegando a los humanoides actuales, Robot Builder y el Kondo KHR-2.
Este ultimo no iba a ser menos y entra en el "selecto club" de los robots incompatibles con Windows 7.
Cosa que produce muchas molestias para el usuario final, llegando en algunos casos en tener que decidir si usar un OS compatible al 100% (WinXP) o usar algo menos obsoleto y tener decenas de problemas de incompatibilidades.
Así pues, hoy he decidido probar el Kondo-KHR2 con su programa Heart to Heart y rápidamente me he topado con los típicos problemas de compatibilidad, pasando por los driver de puerto Serie a USB hasta la comunicación del Robot con el PC.
Así que me volvía encontrar en la tesitura de volver a instalar Win XP o seguir con W7 y buscar 1000 soluciones a otros tantos problemas de incompatibilidad.
Los roboteros de Elotrolado, Davile, IronArthur y Ruben[FF]NEO me han dado entre todos una solución digna de mención por su gran efectividad. (Gracias de nuevo chicos)
Utilizar una maquina virtual fue y es la solución perfecta, algo que en mi gran ignorancia no conocía hasta hoy, o al menos tenia una idea equivocada y preconcebida de dicho invento.
El programa gratuito de Oracle virtualbox y en unos sencillísimos pasos (en español) he instalado en mi Windows7 X64 profesional mi antiguo y maravilloso Windows XP.
Este maravilloso programa funciona extraordinariamente bien, y soluciona TODO los problemas de compatibilidad, siendo la solución definitiva a todo los problemas de compatibilidad entre programas y SO.
Así pues, si tenéis por algún motivo necesidad de tener una maquina virtual instalada con otro SO en vuestro ordenador y diferente al que tenéis instalado, no lo dudéis ni un minuto, Oracle "VirtualBox" es la solución!
Programa gratuito y de libre distribución:
Pagina Oficial de Virtual Box (Maquina virtual de Oracle)
Guanajo, administrador de los foros de Bipedolandia, hace un tiempo se curro una impresionante y guía imprescindible y sobre robótica humanoide.
Una comparativa de los distintos kits comerciales de Robots Humanoides, una guía de lujo y excelente para tener la información más completa sobre los distintos kits comerciales, y aunque la guía tenga un par de años, a día de hoy es una referencia realmente útil para tener una base de datos sobre los distintos robots bipedos disponibles en el mercado, a excepción del Bioloid Premium que no estaba disponible en ese momento (Sí, el Bioloid Comprehensive), así pues, disfrutar de esta guía definitiva:
Gráfica del Torque de los servos:
Gráfica de la Velocidad de los Servos, el más lento a la izquierda y más rápido a la derecha:
Gráfica de Precios, esto no le hagáis mucho caso, ya que dependiendo de las tiendas varia bastante:
Gráfica de la altura en pulgadas de cada robots:
Gráfica de los Grados de Libertad de cada uno de ellos:
Comparativas al detalle:
The End
Tutorial RoboBuilder: Empezar a programar con Microsoft Robotics Studio
Una de las opciones interesantes de este Kit de Robot Humanóide, es la posibilidad de trabajar bajo el entorno de programación de Microsoft Robotic Studio.
Esta guía de “iniciación” la he hecho con idea de empezar el camino de la programación por módulos en dicho entorno, en unos sencillos pasos podremos iniciar el uso del Robot con las opciones del programa mencionado.
Antes de nada tenemos que descargar dos archivos para el funcionamiento del programa y compatibilidad del mismo y cerciorarnos que el firmware del Robot es igual o superior a la versión 2.15.
1º Descargar el entorno de programación: Microsoft Robotics Studio 2008 R3 disponible en la pagina de Microsoft (unos 440 megas): Microsoft Robotics Studio 2008 R3
2º Descargar el Plug-in que permitirá al programa Microsoft Robotics Studio 2008 R3 reconocer el RoboBuilder Este archivo también lo tenéis disponible en la pagina de RoboBuilder pero lo he subido a Megaupload donde no necesita registro previo: Megaupload
El paso siguiente es instalar el ejecutable Microsoft Robotics Studio 2008 R3, una vez instalado (toda las opciones por defecto) pasamos al segundo paso.
Con el segundo archivo descargado, lo descomprimimos, y el contenido de la carpeta BIN lo seleccionamos:
Y copiamos para llevárnoslo a C:\Documents and Settings\Nombre del usuario\Microsoft Robotics Dev Studio 2008 R3\bin para copiarlo en dicha carpeta, veréis unos archivos parecidos a los que acabáis de copiar en dicha carpeta (La mayoria .DLL).
Si habéis seguido los pasos anteriores correctamente, tenéis que tener en el escritorio un acceso directo al ejecutable:
Visual Programming Language 2008 R3 o en su defecto tendréis acceso desde:
C:\Users\Secteur7\AppData\Roaming\Microsoft\Windows\Start Menu\Programs\Microsoft Robotics Developer Studio 2008 R3
Una vez vez el programa y el Plug-in instalados, podemos proceder a conectar el Robot Builder al ordenador:
Abrimos el programa y en la sección “services” seleccionamos RoboBuilderBrick y lo arrastramos a la zona de trabajo por módulos.
Al seleccionar RoboBuilderBrick, tendremos la oportunidad de acceder a las propiedades del icono en cuestión, en la columna de la derecha veréis dichas propiedades, seguidamente seleccionamos Set Inicial Configuration para configurar el puerto serie de nuestro robot (lo que permitirá la comunicación entre el PC y el Robot) seleccionamos el puerto correcto y podemos pasar al siguiente paso.
Volvemos a la sección “services” y esta vez seleccionamos "Direction Dialog". Para arrastrarlo junto al primer modulo en la zona de trabajo.
Ahora en la sección de arriba que se llama "Basic Activities", seleccionamos un modulo “if”, seis módulos “Data” y un modulo “Merge”, tal que así:
Ahora empecemos a trabajar y configurar todo los módulos seleccionados y conectarlos entre si.
El primer paso es conectar el modulo "Direction Dialog" y el modulo "if", desde el pequeña bola de conexión del modulo Direction Dialog donde aparecerá un “hilo de conexión” al conectarlos aparecerá una ventana de configuración, donde seleccionaremos ButtonPress.
El siguiente paso es añadir cinco comandos al modulo "if" mediante el símbolo +, los comandos son los siguientes:
Name == “Forwards”
Name == “Backwards”
Name == “Stop”
Name == “Left”
Name == “Right”
Ahora pasamos a los módulos "Data", que son seis, los valores para añadir son los siguientes:
7
4
10
7
6
8
Ahora seguimos conectamos el modulo if (con los comandos) a los módulos “Data”, repetimos la operación, esta vez con los módulos Data, hacia el modulo “Merge” y por ultimo el modulo Merge con el modulo RoboBuilderBrick, en este ultimo paso deberemos configurar la conexión de ambos módulos de la siguiente manera:
From: ForwardedOutput
Get: MotionControl
Y en Data Connections selectionaremos “value”
Y así debería de quedar nuestra área de trabajo:
Y ya estamos listos para probar los movimientos básicos que hemos programado mediante Microsoft Robotic Studio, recordar de guardar el proyecto antes de lanzar la aplicación mediante el F5.
Con el Robot conectado y encendido, a lanzar los comandos mediante F5, veréis una ventana de comandos que se abrirá, y otra ventana de controles, y si habéis seguido la configuración paso a paso, podréis mover el robot mediante el cuadro de control desde el programa.
He grabado un pequeño vídeo del asunto:
http://www.youtube.com/watch?v=CmEAwYhGFCMFIN
Siguiendo los pasos del primer tutorial RoboBuilder: Microsft Robotics Studio.
Esta 2º parte trata de controlar el robot, mediante comandos de voz, si bien hemos usado la base del primer tutorial y los módulos If, Merge, Data y RoboBuilderBrick siguen siendo los mismos, esta vez remplazamos el modulo DirectionDialog por dos módulos de comandos de voz, los módulos son los siguientes:
SpeechRecognizerGui
Y el SpeechRecognizer
En el modulo if, los comandos Name deben ser sustituidos por Text como veis a continuación:
Siguiendo las mismas pautas que en el primer tutorial, y los mismos valores en los modulos data, conectamos entre si los modulos SpeechRecognized y el modulo "if" el comando de conexion tiene que ser SpeechRecognized.
Y entre los modulos Merge y RoboBuilderBrick, el comando tiene que ser MotionControl con el valor "value"
Una vez añadidos las ordenes en el modulo "if" (adelante, atrás, puñetazo, derecha...etc) con los módulos "data" queda añadirlo al diccionario mediante el panel de control de la ventana de comandos (f5):
Accedemos al panel de control del modulo SpeechRecognizerGui para añadir al diccionario los comandos de voz elegidos a la orden impuesta:
Mi configuración final es la siguiente:
Y así pues, concluye el tutorial sobre comandos de voz.
He grabado un vídeo de más de 5 minutos explicando el resultado final:
http://www.youtube.com/v/RERqlhYSqgY

Gremio escribió: no son mucho más caro que montarte tu propio robot y ir comprando piezas para ello (Brakets, servos, micro servos) si lo sumás todo veras que no hay mucha diferencia.
bufalo escribió:Si me pillara uno la piñata se la dejo de hojalata..... Malísimo, lo sé
Los servos son del tipo de los usados toda la vida de radiocontrol?, o de universal/estándar ésto no tiene nada...
Por cierto, acojonante hilo Gremio, enhorabuena y gracias por la info
erbeni escribió:tenemos aqui algun hilo sobre arduino?, me gustaria iniciarme en el tema ya que me gustaria hacer un proyectiyo y no he encontrado nada por aqui, o no he buscado bien.
Saludos.

![[sonrisa]](/images/smilies/nuevos/risa_ani1.gif "sonrisa") Para más información, San Google hace milagros.
Para más información, San Google hace milagros. jorcoval escribió:Buen hilo, me voy a suscribir.
Yo he tocado bastantes robots tanto por hobby como por la carrera (ingeniería informática, intensificación industrial).
La verdad es que mover un lego o un robonova (con el que hice el PFC, por cierto) mola bastante, pero no tiene nada que ver con cuando mueves un Kuka o un ABB desde detrás de una mampara de seguridad, porque si estás cerca te arrea una leche que ni Mike Tyson
La verdad es que lo que comentais del precio es cierto... y no lo es. Si te compras un robot o piezas del mismo, te puede salir por un buen pico.
Pero si teneis conocimientos de electrónica básica (y si no, tirais de internet y de paso aprendeis un poco de la misma) podeis conseguir robots bastante chulos por menos de 30 euros.
Yo mismo tengo un robot, actualmente programado como sigue lineas, y me costó menos de 40 euros comprar las piezas (que son un par de micros y 2 servos, el resto de material no vale apenas dinero).
También podeis reciclar un antiguo coche teledirigido, y ponerle una placa construida por vosotros.
Y ya para los más pro (aunque hay tutoriales por internet), he visto brazos robots construidos con motores de impresoras viejas.
PD: El tema de servos.
Los robots comerciales llevan servos propios, por norma general. Pero es bien fácil comprar un servo de radiocontrol y adaptarlo. Generalmente necesitan un pequeño trucaje (desmontar, cortar un tope de plástico, sustituir un varistor) y ya está perfectamente adaptado para la robótica práctica
![[ok]](/images/smilies/nuevos2/okis.gif "ok")
![[rtfm]](/images/smilies/rtfm.gif "Lee!")
jorcoval escribió:Buen hilo, me voy a suscribir.
Pero si teneis conocimientos de electrónica básica (y si no, tirais de internet y de paso aprendeis un poco de la misma) podeis conseguir robots bastante chulos por menos de 30 euros.
PD: El tema de servos.
Los robots comerciales llevan servos propios, por norma general. Pero es bien fácil comprar un servo de radiocontrol y adaptarlo. Generalmente necesitan un pequeño trucaje (desmontar, cortar un tope de plástico, sustituir un varistor) y ya está perfectamente adaptado para la robótica práctica
![[looco]](/images/smilies/nuevos2/borracho.gif "loco")


 ) lo poco que se de usar pics para montaje de robots y luego programarlos en basic, forman tambien parte de algun que otro kit de automontajes como el:
) lo poco que se de usar pics para montaje de robots y luego programarlos en basic, forman tambien parte de algun que otro kit de automontajes como el: 68000 escribió:Yo siempre me lo he preguntado, pero ¿no existe ningún robot que haga movimientos sin desequilibrarse? Un ejemplo: Nosotros al andar no vamos yendo de lado a lado. ¿No pueden añadirse contrapesos? Se que estos kits son educativos y no de uso industrial, pero sería algo de agradecer.
Gremio escribió:68000 escribió:Yo siempre me lo he preguntado, pero ¿no existe ningún robot que haga movimientos sin desequilibrarse? Un ejemplo: Nosotros al andar no vamos yendo de lado a lado. ¿No pueden añadirse contrapesos? Se que estos kits son educativos y no de uso industrial, pero sería algo de agradecer.
¿sin desiquilibrarse?
Veamos, todo los robots hacen movimientos sin desequilbrarse, al igual que los humanos y para ellos tenemos heramientas para que no nos escoñemos al andar.
Y en los robots pasa lo mismo, un robot sin un Acelerómetro es logico que se escalabre, al igual si a nosotros nos quitaran el nervio auditivo no serias capaz de mantenerte en pie.
A un robot humanoide le pasa lo mismo, ponle un Acelerómetro de 2 ejes (Los hay de más) y andan igual que tu y que yo.
Gremio escribió:El modelo que pones es el Kondo KHR-1, aunque ya sea un modelo obsoleto (ya van por el Kondo KHR-3) no veo que se desequilibre, entiendo por desequilibrarse que se caiga y no mantenga el equilibrio, aunque apostaria que ese Kondo KHR-1 no tiene puesto ningun Acelerómetro, luego entran muchos otros factores, los valores, configuracion y programacion de los servos, esto es fundamental para que el robot tenga movimientos más limpios y sin tener pinta de desequilibrio.
Sin mencionar el que los servos esten montados corectamente (que no es el primero que los monta al reves) entran muchos factores, pero vamos, la mayoria de los humanoides que he visto en directos bien configurados son una maravilla, ahora bien, son bichos de unos 600 o 1000€, si te vas a un androide de más de 12.000€ seguro que hace los movimientos mucho más natural XD
Pero vamos, ya ves el segundo video que as puesto del KHR-2HV, ese por el tipo de movimiento, rapidez y bien realizado, tiene Acelerómetro :)
68000 escribió:Vamos, que más bien depende de la destreza y dinero que tenga el usuario xD. Siempre me ha gustado la robotica, lastima que no tenga el tiempo ni el dinero para adentrarme en ella. Gracias por las respuestas
), aunque todo avanza y se ven los precios reducir, la robotica humanoide todavia no a visto los precios caer como otros sectores, por poner un ejemplo, el Robonova de hitec (el que llevo en la firma) es muy bonito, pero la controladora esta desfasadisima, es de los 90!!! y todavia lo siguen vendiendolo a 800€...
King_George escribió:...
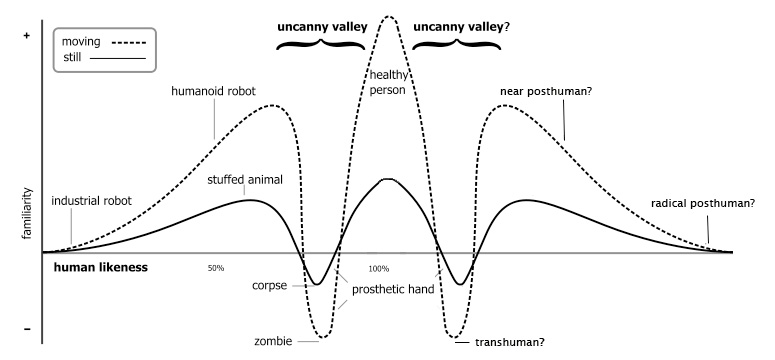
King_George escribió:A riesgo a mi edad de parecer un pajero y salirme del tema del hilo os hago una pregunta,
¿Soy el único que piensa que en 15 o 20 años habrá muñecas hinchables realistas (hechas de silicona o algún material similar) pero robotizadas por dentro?
Ya hay muñecas como esta:
jorcoval escribió:King_George escribió:...
Te pongo una gráfica del uncanny valley
[...]
Es una gráfica que mide el grado de aceptación que tenemos los humanos hacia los robots humanoides, dependiendo de su realismo.
Como ves, aumenta con el realismo del robot hasta cierto punto, en el cual el grado de aceptación se convierte en repugnancia.
No es hasta que el robot es "indistinguible" de un humano, hasta que vuelve a tener aceptación.
Y aún nos falta mucho para que sea "indistinguible"
rodaballo o3o escribió:Acabo de terminar un cursillo de 2 semanas en mi universidad, y nos han dejado trastear durante dos semanas con unos Bioloid premium a los que habían puesto una placa de expansión (añadirle 10 conversores ADC, y una brújula digital) y unos cuantos sensores IR
Aunque claro, ahora para ponerme yo en el tema ... cómo que es un POCO caro... ya sabía que cada servo (unos RX-12+ de robotis) ya son unos 50$ CADA UNO, por ejemplo.
Y otro tema es que tengo nula experiencia soldando.
¿Alguna idea?
OS dejo algun video de la edicion anterior, cuando tenga el de mi robotillo os lo pongo
http://www.youtube.com/watch?v=5ti_CO5BvCE
(este es el del año pasado, aún usaban robonovas y algun bioloid normal, sin brújula).
Destacar que la brújula, una de 50€ nos dijeron, ayudaba MUCHísimo con la desviación de los robots al andar...
King_George escribió:pero por 500 euros me parece muy muy muy barato.










wah_wah_69 escribió:¿Cuántos leuros?
Con el fin de explorar las características compatibles con humanoides, hemos desarrollado un robot bípedo pasivo obediente. El robot cuenta con un total de 17 DOF (grados de libertad), 6 activa y una pasiva (articulación del dedo) DOF
en cada pierna, y 3 grados de libertad activos en la cintura para poder obtener una mayor flexibilidad de movimiento.
Cada conjunto incluye tres sensores de posición (2 absolutos y relativos 1) y un sensor de par.
El robot está equipado con 6 e Sensores de fuerza-par en los tobillos y cinco celdas de carga de 1 eje de la planta del pie. Además, cCub tiene un sensor de velocidad de giro de 3 ejes y un
Acelerómetro de 3 ejes, ubicado en la pelvis. En su estructura de hardware electrónico, el controlador principal es un Intel Core 2 Duo a 1,5 GHz dual de 3,0 GB de RAM, corriendo en una de 32 bits sistema operativo GNU / Linux que se basa en un tiempo real de extensión Xenomai.
La comunicación de datos se realiza a través del protocolo Ethernet en tiempo real llamado RTnet. Estos son los experimentos preliminares de dinámica para caminar . La forma de caminar se generan utilizando el criterio de ZMP y se calcula en tiempo real.

Gremio escribió:El departamento de investigacion robotica Italiana tiene un video en youtube de los denominados curiosos.
Aparentemente vemos un medio bipedo de un tamaño considerable, caminar sin lo que apriori no parece muy complicado (cualquier robot humanoide comercial lo hace sin relativos problemas) pero si nos fijamos en el vídeo, sorprende la cantidad de servos, placas y motores que llevan las piernas y caderas.
Investigando un poco más y leyendo la descripción del vídeo de sus creadores, estamos ante investigación pura y dura sobre inteligencia artificial (IA)
Si nos fijamos en la descripción, pone lo siguiente:
Con el fin de explorar las características compatibles con humanoides, hemos desarrollado un robot bípedo pasivo obediente. El robot cuenta con un total de 17 DOF (grados de libertad), 6 activa y una pasiva (articulación del dedo) DOF
en cada pierna, y 3 grados de libertad activos en la cintura para poder obtener una mayor flexibilidad de movimiento.
Cada conjunto incluye tres sensores de posición (2 absolutos y relativos 1) y un sensor de par.
El robot está equipado con 6 e Sensores de fuerza-par en los tobillos y cinco celdas de carga de 1 eje de la planta del pie. Además, cCub tiene un sensor de velocidad de giro de 3 ejes y un
Acelerómetro de 3 ejes, ubicado en la pelvis. En su estructura de hardware electrónico, el controlador principal es un Intel Core 2 Duo a 1,5 GHz dual de 3,0 GB de RAM, corriendo en una de 32 bits sistema operativo GNU / Linux que se basa en un tiempo real de extensión Xenomai.
La comunicación de datos se realiza a través del protocolo Ethernet en tiempo real llamado RTnet. Estos son los experimentos preliminares de dinámica para caminar . La forma de caminar se generan utilizando el criterio de ZMP y se calcula en tiempo real.
La verdad que me sorprende tanta potencia de hard como controladora, si bien no estoy puesto en desarrollo de todo en IA, lo cierto es que no imaginaba que se necesitara tanta potencia bruta.
Me refiero comparándolas con las controladoras que montan los bípedos "comerciales" no obstante es un desarrollo diferente y mucho más amplio el compaginarlo con IA desde cero, si bien esto seguramente sea parte de un proyecto más amplio que "solamente" sea que el robot a cada paso que de, este aprendiendo el solo a caminar, es bastante impresionante saber estos detalles al ver el vídeo.
http://www.youtube.com/watch?v=HfUHrl8- ... r_embedded
rodaballo o3o escribió:Mola el robotillo Gremio, aunque no puedo opinar porque robonova no toqué ni uno en el seminario ...
Por fin han colgado los videos de la competicion final
http://www.youtube.com/user/humanoidLab
Lo de video 1 y video 2 de cada TEAM es que el laberinto era distinto.
(y no os colgaré aquí los 20 videos, eran 10 grupos de 2 y 2 circuitos...)
Para que os hagáis una idea, es algo más difícil que la competición nacional de robots
Notar que tienen una brújula incorporada y que corregían la trayectoria, ya que un robot bípedo se desvía mucho ;___; en función de la batería, el desgaste de los servos, y mil historias más. Lo de la brújula era la novedad de este curso, y a excepcion de dos grupos a los que se la dieron quemada, va bien .... con un convertidor A/D daba a la controladora la posición en décimas de grado (0-3600).
Otra cosa es que el gesto de giro del robot gire mas o menos, y tengas que aceptar desviaciones de 30º si no quieres que se pase la vida orientándose.
Aviso: Se habla en catalán en los vídeos
Dios, salgo en el video y mi voz sale HORRIBLe
wah_wah_69 escribió:No creo que haga falta tanta potencia de cálculo, lo que sucederá es que usar hardware de pc de hace unos años es mucho más barato que irte a algún kit de sistemas embebidos.
![[Ooooo]](/images/smilies/nuevos/sorprendido_ani1.gif "Oooooo")

































































































